Brushless Motors - сторінка 4
« ‹ 2 3
Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
")
Существуют бесколлекторный двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз подключен "+" к другой "-" питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на свободной фазе через нулевую точку (половину питающего напряжения). Т.е. нужно отследить момент, когда напряжение на свободной фазе сравняется со средней точкой. Разумеется, для работы этого метода двигатель должен вращаться. Этот метод хорошо работает при сравнительно высоких оборотах двигателя. При низких оборотах наводимая ЭДС может оказаться недостаточной для четкого определения положения ротора. Тем не менее, этот метод применяется. Один из методов определения положения ротора при невращающемся двигателе будет рассмотрен в следующей статье. Способы запуска беcколлекторного бездатчикового двигателя также будут рассматриваться в следующей статье.
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
")
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.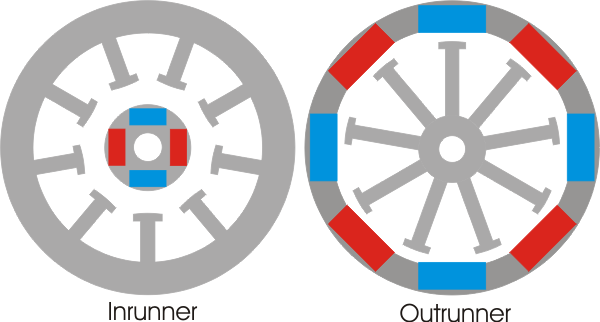
Бесколлекторные двигатели постоянного тока. Что это такое?

Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
« ‹ 2 3
Категорії
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви