Тег: stm32
FOC - своя реалізація векторного керування. Підбиваю підсумки 2022 року
FOC (Field Oriented Control) using Polar Coordinates. Своя реалізація векторного керування безколекторними моторами у якій використовуються полярні координати. Підбиваю підсумки що зроблено за 2022 рік.
Конструктор регуляторів моторів. Підбиваю підсумки 2022 року.
Конструктор регуляторів моторів. За цей рік зроблено не багато. Але проєкт не вмер. Невеличкий рух є, поступово буде розвиватися цей напрямок. Можливо будуть цікаві відео про окремі блоки.
Сторінка зі схемами, платами:
Відео по темі:
Чому трифазні мотори стали такими популярними?
Своя бібліотека для векторного керування безколекторними моторами

Адаптивний ПІД регулятор
Конструктор регуляторів моторів. Структура.
Конструктор регуляторів моторів. Анонс.

FOC Position Control. Векторне управління - Стабілізація положення

Безколекторні двигуни можливо використовувати не тільки як тяглові, а ще як сервоприводи для систем позиціювання. У цьому випадку їх не слід порівнювати з кроковими електродвигунами. Використовуючи Безколекторні двигуни можна побудувати більш досконалу систему утримування положення. Навіть як що вплив зовнішніх сил буде намагатися зрушити систему з заданого положення, двигун буде намагатися утримувати задане положення. А якщо зовнішні сили відхилять систему від заданого положення, двигун поверне її у задане положення. Для того, щоб система могла оцінювати положення, двигун має бути обладнаний датчиком положення (зазвичай енкодером). Використовуючи зворотній зв'язок з датчика положення, контролер зможе керувати двигуном для забезпечення утримання положення. Звісно, така система буде більш складною і більш дорогою за просту систему з кроковими електродвигунами без зворотного звʼязку.
Рекуперація. FOC і цікаві досліди
Ротор з металевим кільцем проти ротора без кільця
Порівняння характеристик дерев'яного бісколлекторного мотора з різними роторами.
🇺🇦 FOC Board STM32F103RB 🧩
(Оновлено 06.04.2021)
Плата керування безколекторними PMSM моторами на базі модуля мікроконтроллера STM32F103RBT6.
Це бюджетний варіант плати для вивчення MCSDK, який Ви можете зібрати власноруч з доступних у вільному продажу компонентів. Ви можете завантажити схему і файли для виготовлення плати нижче.
Інформація по цьому проекту постійно буде оновлюватися, коригуватися і доповнюватися на цій сторінці.
Схема
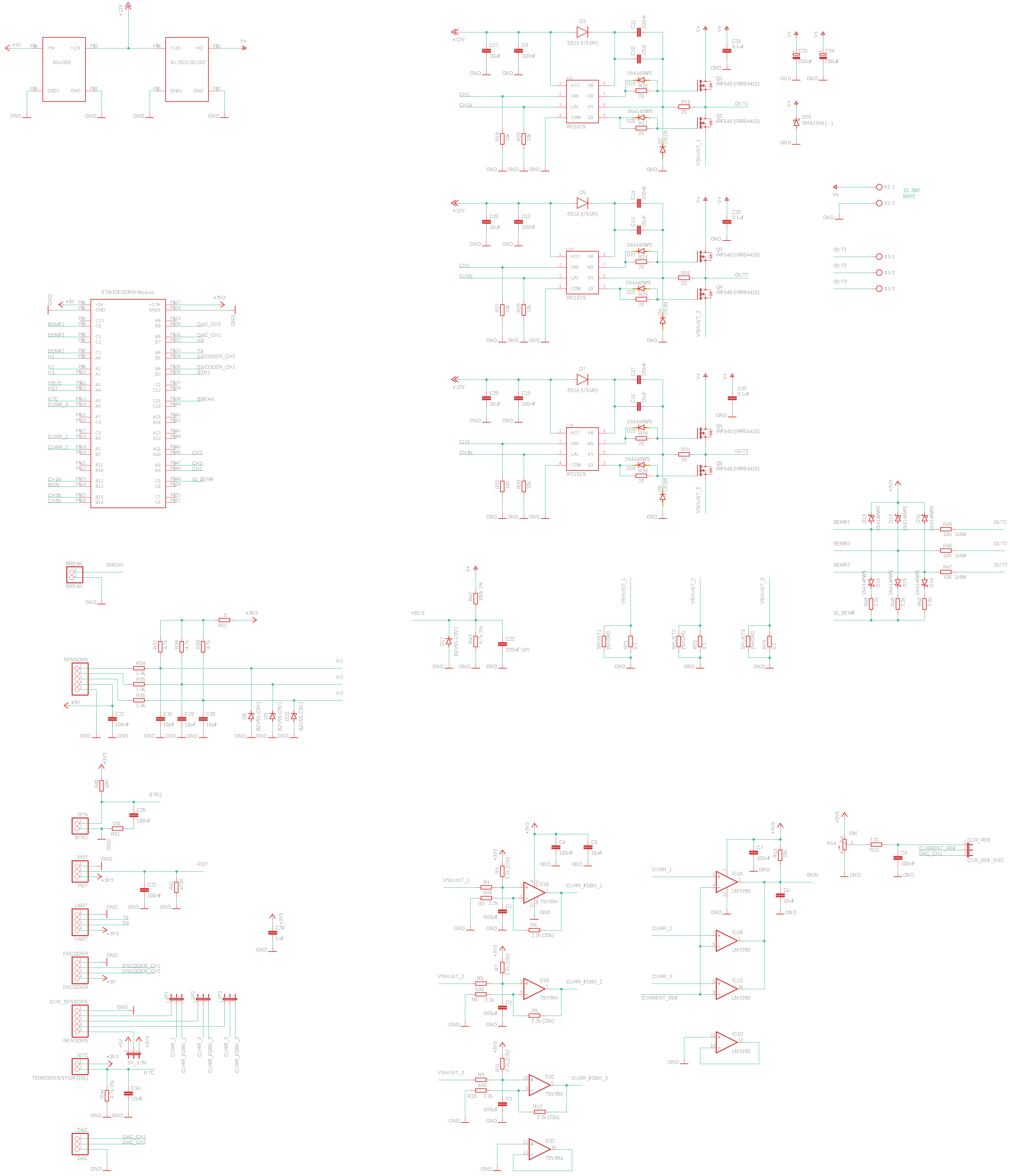
Призначення
Плата призначена для вивчення MCSDK. Може керувати моторами потужністью до 60 Ватт з напругою живлення до 36 В. Або моторами до 300 Ватт з напругою живлення 48 В.Вигляд плати
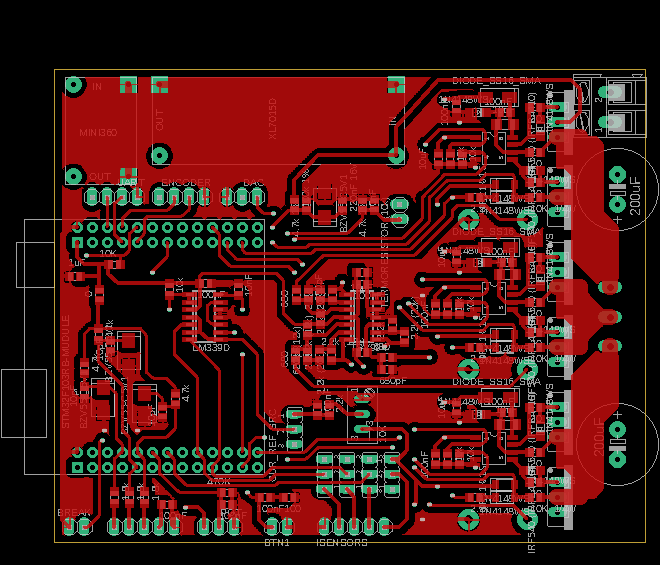
Вигляд плати зверху
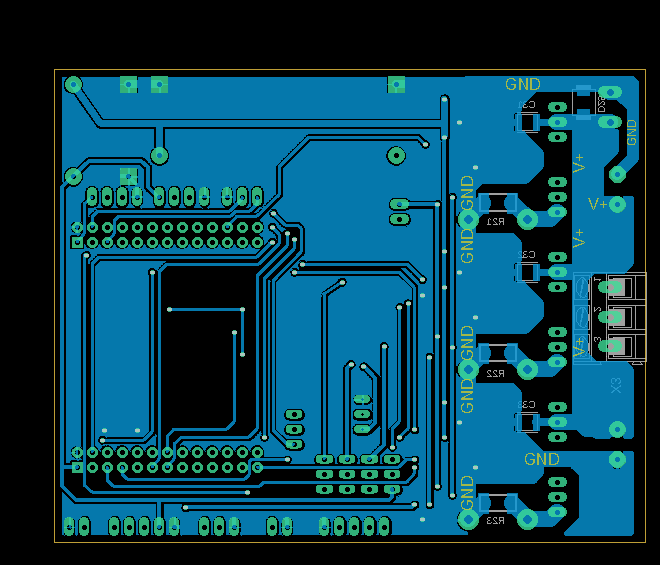
Вигляд плати знизу
STM32 Motor control SDK - керування оборотами мотора за допомогою потенціометра 📑
Векторне управління безколекторним мотором. Як програмно керувати обертами мотора за допомогою потенціометра. X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
Tags
bme280 mpu-6050 encoder examples adc lcd python wifi bluetooth rtc pwm piezo ngnix watchdog books rfid web st-link eeprom bkp usart led nodemcu flash websocket uart 3d-printer options html git meteo gpio soldering flask tim servo rs-232 raspberry-pi programmator stm32 sms dma battery dht11 hih-4000 css ssd1331 pmsm bmp280 avr brushless motor usb barometer max1674 displays esp8266 docker java-script ssd1306 i2c capture nvic bldc atmega exti ethernet timer mpu-9250 smd mpx4115a sensors dc-dc mongodb eb-500 remap solar foc gps
Архіви