Video
Відео - FOC. Field weakening

FOC. Field weakening
Як працює послаблення поля (Field weakening) в U-FOC.
Про U-FOC
https://blog.avislab.com/u-foc/about/
U-FOC git
https://git.avislab.com/andre/U-FOC
U-FOC PC Monitor:
https://blog.avislab.com/uploads/u-foc-monitor/#/
Відео - U-FOC Bluetooth, AS5600 vs Hall sensors, Upload via browser

U-FOC Bluetooth? AS5600 vs Hall sensors Upload via browser
Попередне відео: U-FOC. Регулятор для безколекторних моторів на STM32G431:
https://youtu.be/VrNq8lum8L8
U-FOC PC Monitor:
https://blog.avislab.com/uploads/u-foc-monitor/#/
Відео - FOC Polar Coordinates. Про стабілізацію моменту

FOC Polar Coordinates. Про стабілізацію моменту
Поточнюю нформацію що до стабілізації моменту.
Посилання на попередне відео: https://youtu.be/qpk2cCqYEew
Про U-FOC
https://blog.avislab.com/u-foc/about/
Відео - U-FOC. Регулятор для безколекторних моторів на STM32G431

U-FOC. Регулятор для безколекторних моторів на STM32G431
Розповідаю про проєкт U-FOC та новій регулятор для безколекторних моторів на мікроконтроллері STM32G431
Про U-FOC
https://blog.avislab.com/u-foc/about/
U-FOC git
https://git.avislab.com/andre/U-FOC
CRSF to PWM
https://blog.avislab.com/crsf-to-pwm/
https://git.avislab.com/andre/STM32G030_CRSF_TO_PWM
Приклади для STM32G431:
https://github.com/avislab/STM32G431_HAL_Examples
U-FOC PC Monitor:
https://blog.avislab.com/uploads/u-foc-monitor/#/
Відео - FOC. Polar Coordinates
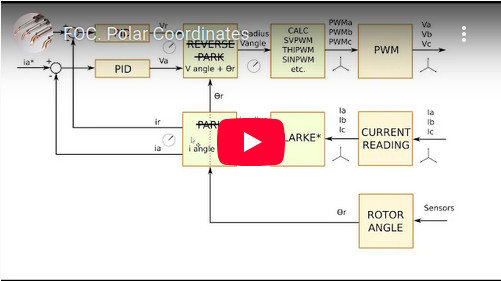
Використання полярних координат у векторному керуванні двигунами. У цьому відео я "топлю" за використання полярних координат у векторному керуванні двигунами. Цей підхід простіший у реалізації і працює швидше.
Попереднє відео FOC & Polar coordinates:
https://youtu.be/I7q4bYjqLqg
Відео - Tiny PnP machine
Невеличкий станок - встановлювач SMD компонентів. Розроблений власноруч. Програмне забезпечення розроблено самостійно.
Відео - Tiny PnP machine
Простий компактний Pick and place - станочок початкового хобійного рівня. На відео встановлює SMD компоненти розміром 0603 (0.85 x 1.6 mm). Не має камер, як в OpenPnP. Не підходить для серійної/дрібносерійної роботи. Перший тест пройшов не дуже вдало - станок впустив один елемент, один не захопив (треба чітко коригувати висоти компонентів).
Цей станок згодом було перероблено. Він вже має поворотну голову, змінні сопла, верхню та нижню камери з машинним зором, маленьку помпу. Розроблено власне програмне забезпечення.
Відео - Back EMF BLDC двигуна

Осцилограми BLDC мотора. Розбираймось що таке зворотна електрорушійна сила.
Посилання де можна завантажити книжку "Brushless Permanent Magnet Motor Design": https://blog.avislab.com/BrushlessPermanentMagnetMotorDesign-book/
Відео - DC-DC для IGBT драйверів ізольований 2 W +15 -8 вольт

Відео про DC-DC для IGBT драйверів ізольований 2 W +15 -8 вольт.
U-FOC. Стабілізація положення

Приклад використання API для реалізації стабілізації положення валу мотора (серворежим). Приклад для двоконтурного і триконтурного керування.
U-FOC. API (Application Programming Interface)
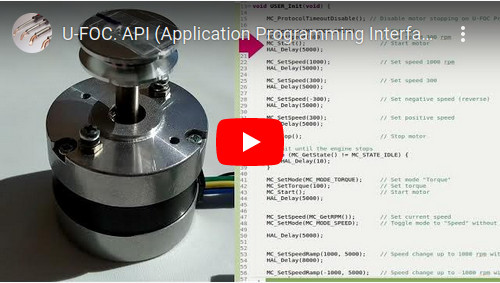
Приклад використання API (Application Programming Interface) проєкту U-FOC. Програмне керування обертів мотора. Керування обертами мотора потенціометром.
U-FOC. Що вміє Базовий приклад
Це відео про базовий приклад проекту U-FOC. U-FOC - Це моя власна реалізація векторного керування безколекторними двигунами, яка у своїй матиматиці використовує обчислення у полярних координатах.
Tags
bme280 mpu-6050 encoder examples adc lcd python wifi bluetooth rtc pwm piezo ngnix watchdog books rfid web st-link eeprom bkp usart led nodemcu flash websocket uart 3d-printer options html git meteo gpio soldering flask tim servo rs-232 raspberry-pi programmator stm32 sms dma battery dht11 hih-4000 css ssd1331 pmsm bmp280 avr brushless motor usb barometer max1674 displays esp8266 docker java-script ssd1306 i2c capture nvic bldc atmega exti ethernet timer mpu-9250 smd mpx4115a sensors dc-dc mongodb eb-500 remap solar foc gps
Архіви