Тег: gps
GPS-трекер + Дисплей SSD1306

У одній з попередніх статей розглядався GPS-трекер на базі ESP8266
Тепер підключимо до нього дисплей SSD1306. Докладніше про SSD1306 та бібліотеку U8G йшлося у статті ESP8266 NodeMCU. U8G
Треба підключити дисплей SSD1306 як показано на схемі:
![]()
GPS-трекер на базі ESP8266
GPS-трекер на базі ESP8266 з SD-карткою та web-інтерфейсом
 Цей приклад демонструє, як можна зробити простий GPS-трекер за допомогою популярних електронних модулів. У цьому прикладі використовується Wi-Fi модуль ESP-12 на базі чіпа ESP8266. Прошивка NodeMCU та LUA-скрипти з відкритим кодом.
Цей приклад демонструє, як можна зробити простий GPS-трекер за допомогою популярних електронних модулів. У цьому прикладі використовується Wi-Fi модуль ESP-12 на базі чіпа ESP8266. Прошивка NodeMCU та LUA-скрипти з відкритим кодом.
Обновленный GPS модуль EB-500
В последней приобретенной партии GPS модулей EB-500 обнаружены некоторые доработки. GPS координаты теперь содержат на два значащих знака больше, чем в раньше. Пока не могу сказать вызвано ли это увеличением точности GPS модуля EB-500, но библиотеку gps.c пришлось корректировать. Пока поставил "костыль" в функции gps_get_long_value. Теперь она выглядит так:
GPS. Расчет дистанции между двумя точками по GPS координатам. Расчет курса на точку.
Читайте начало в статье GPS модуль EB-500 и ATMega
При использовании GPS модуля появилась необходимость вычислить расстояние от текущего положения до заданной точки. Фактически это вычисление расстояния по двум GPS координатам. Поскольку, в этом вопросе у меня было недостаточно знаний, пришлось немного почитать. Рекомендую для прочтения эти статьи: Системы геодезических координат или "Что такое датум?"
Вычисление постоянного азимута и длины линии румба между двумя точками для геодезических координат Сравнение расчетов длин и азимутов для разных способов вычисления
Даже если Вы не будете глубоко вникать в суть этих статей, это поможет Вам осознать суть некоторых проблем и получить ответы на большинство вопросов, связанных с точностью вычислений. В одной из этих статей приводится алгоритм, который и был адаптирован для библиотеки gps.c.
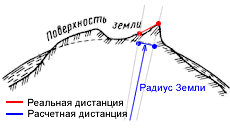
При вычислении применяются упрощения. Предполагается, что точки находятся на сфере с радиусом 6372795 метров. Следует понимать, что если точки находятся на разных высотах, то вычисленное расстояние будет отличаться от реального, поскольку разница высот не учитывается.
GPS EB-500 + ATMEGA. Схема. Пример для WinAVR (GCC).
.")
Некоторое время назад я публиковал статью GPS модуль EB-500 и ATMega и GPS. Расчет дистанции между двумя точками по GPS координатам. Расчет курса на точку. Теперь представляю пример схемы на базе контроллера ATMEGA64 проект для WinAVR (GCC). В проекте используется доработанная библиотека для EB-500 115200. Поскольку большинство модулей EB-500 теперь работают на скорости 115200, пришлось немного модифицировать разбор сообщений модуля.
GPS модуль EB-500 и ATMega
Статьи по теме: GPS EB-500 + ATMEGA. Схема. Пример для WinAVR (GCC) GPS. Расчет дистанции между двумя точками по GPS координатам. Расчет курса на точку
Понадобилось мне в очередном проекте задействовать GPS навигацию. Требования к GPS модулю были следующие:
- - UART интерфейс
- - нормальная чувствительность
- - быстрый старт
- - небольшая стоимость
- - можно было без проблем купить в Украине
Tags
bme280 mpu-6050 encoder examples adc lcd python wifi bluetooth rtc pwm piezo ngnix watchdog books rfid web st-link eeprom bkp usart led nodemcu flash websocket uart 3d-printer options html git meteo gpio soldering flask tim servo rs-232 raspberry-pi programmator stm32 sms dma battery dht11 hih-4000 css ssd1331 pmsm bmp280 avr brushless motor usb barometer max1674 displays esp8266 docker java-script ssd1306 i2c capture nvic bldc atmega exti ethernet timer mpu-9250 smd mpx4115a sensors dc-dc mongodb eb-500 remap solar foc gps
Архіви