Тег: i2c
ESP8266 NodeMCU. I2C. BME280

Приклад роботи ESP8266 (NodeMCU) з датчиком атмосферного тиску, температури і вологості BME280. Датчик BME280 працює по шині I2C (IIC). Шину IIC будемо використовувати для одночасної роботи з датчиком BME280 та дисплеєм SSD1306. Нагадаю, що приклад використання дисплею SSD1306 з бібліотекою UG8 був наведений у статті ESP8266 NodeMCU. SSD1306. U8G.
ESP8266 NodeMCU. SSD1306. U8G
Для роботи з різними дисплеями NodeMCU використовує бібліотеку U8glib. Підтримуються дисплеї які працюють по шині SPI або IIC. В документації до NodeMCU можна перевірити чи підтримується саме ваша модель дисплею: https://nodemcu.readthedocs.io/en/master/en/modules/u8g/ У прикладі використовується графічний OLED дисплей SSD1306 який працює по шині IIC.
ESP8266 NodeMCU. I2C. BME280
Приклад роботи ESP8266 (NodeMCU) з датчиком атмосферного тиску, температури і вологості BME280. Датчик BME280 працює по шині I2C (IIC). Шину IIC будемо використовувати для одночасної роботи з датчиком BME280 та дисплеєм SSD1306. Нагадаю, що приклад використання дисплею SSD1306 з бібліотекою UG8 був наведений у статті ESP8266 NodeMCU. SSD1306. U8G.
20. STM32. Програмування STM32F103. I2C Slave

У попередній статті ми розглянули роботу STM32 з шиною I2C у якості Майстра. Тобто, він був ведучий і опитував сенсор. Тепер зробимо так, щоб STM32 був Slave-ом і відповідав на запити, тобто сам працював як сенсор. Ми виділимо 255 байт пам`яті під регістри з адресами від 0 до 0xFF, і дозволимо Майстру в них писати/читати. А щоб приклад був не таким примітивним, зробимо з нашого STM32, ще і аналого-цифровий перетворювач з інтерфейсом I2C. ADC буде обробляти 8 каналів. Результати перетворень контролер буде віддавати Майстру при читанні з регістрів. Оскільки результат перетворення ADC займає 12 біт, нам потрібно буде 2 регістра (2 байта) на кожний канал ADC.
19. STM32. Програмування STM32F103. I2C Master
Шина I2C досить популярна і дуже багато сенсорів та інших пристроїв використовують саме I2C. Я не буду писати хто, коли і для чого винайшов цю шину та як по ній бігають байти. Цієї інформації повно у Інтернеті, для цього існує Вікіпедія. Коли Ви тримаєте в руках сенсор і бажаєте якнайшвидше отримати з нього дані, та вирішити поставлену задачу, Вам вистачить наступного мінімуму знань:
- Шина I2C - це двопровідна шина з лініями SCL, SDA. Теоретично, на одну шину I2C можна паралельно підключити до 112 пристроїв.
- Обидві лінії шини мають бути через резистори підключеними до живлення. Рекомендований номінал резисторів залежить від швидкості та інших параметрів шини. Зазвичай мало хто з цим морочиться і ставлять резистори у межах від 4.7кОм до 10кОм. Резисторів має бути по одному на кожну лінію. Якщо Ви підключаєте декілька модулів, а на кожному модулі вже впаяні підтягуючі резистори, то виходить, що резистори вмикаються паралельно і їх сумарний опір стає меншим. Це не дуже добре. Та, якщо ви вмикаєте лише два таких модуля і на кожному впаяні резистори по 10 кОм, тоді сумарний опір буде 5КОм, що попадає у межі допустимої норми і шина I2C, скоріш за все, буде працювати. Але повторюю: чіпляти на кожну лінію більше одного резистора - не дуже гарна ідея.
- Кожен пристрій на шині I2C має окрему адресу.
- На шині I2C може бути лише один Master і один, або декілька Slave.
- Швидкість шини може бути різною. Зазвичай використовують два стандарти 100 і 400 КГц. Швидкість лінії має визначатися по самому повільному пристрою на шині. Якщо Slave не встигає, він може "притримати" шину і всі його будуть чекати. Та такий підхід, хоч і є стандартом, але на практиці працює не завжди. У випадку, коли Master не вміє чекати (цим, наприклад страждають мікрокомп`ютери), на шині починається безлад. Тобто, некоректна робота одного з пристроїв на шині I2C (не важливо, у якій ролі - Master або Slave) може викликати проблеми у роботі усіх приладів.
- Якщо напруга живлення контролера відрізняється від напруги живлення датчика, вони мають вмикатися через двонаправлену схему узгодження логічних рівнів.
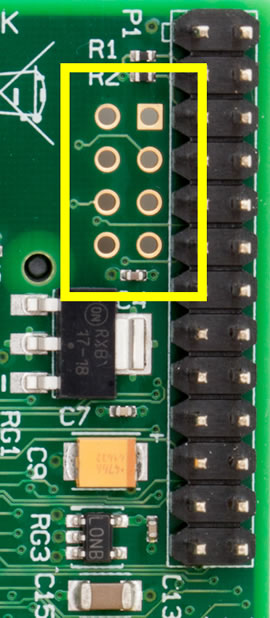
Raspberry-Pi - I2C (TWI)
")
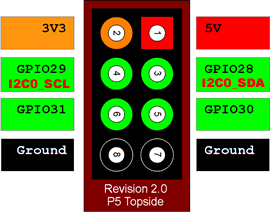
Raspberry Pi B має дві шини I2C (TWI), які виведені на різні роз’єми. Лінії SDA, SCL шини 1 виведені на роз’єм P1. SDA, SCL шини 0 виведені на роз’єм P5.
P5:
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви