Відео - FOC. Polar Coordinates
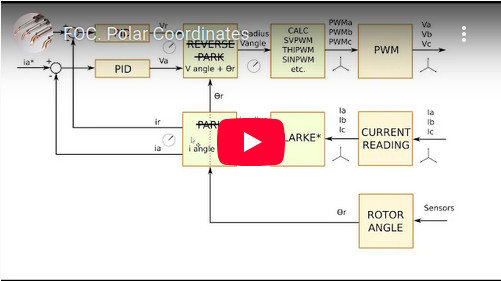
Використання полярних координат у векторному керуванні двигунами. У цьому відео я "топлю" за використання полярних координат у векторному керуванні двигунами. Цей підхід простіший у реалізації і працює швидше.
Попереднє відео FOC & Polar coordinates:
https://youtu.be/I7q4bYjqLqg
Проектуємо робота-сапера. Є деякі проблеми з керуванням двигунами. Потрібна Ваша допомога/консюльтація. За посиланням - відео діючої моделі: https://photos.app.goo.gl/WVVMFJBj1D28H1raA Дякую за увагу
when did you publish the code for "FOC & Polar coordinates"
Code for "FOC & Polar coordinates" will published after Ukrainian victory in the war with russia.
need to talk with you sir please
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви