ESP8266 NodeMCU. I2C. BME280
Приклад роботи ESP8266 (NodeMCU) з датчиком атмосферного тиску, температури і вологості BME280. Датчик BME280 працює по шині I2C (IIC). Шину IIC будемо використовувати для одночасної роботи з датчиком BME280 та дисплеєм SSD1306. Нагадаю, що приклад використання дисплею SSD1306 з бібліотекою UG8 був наведений у статті ESP8266 NodeMCU. SSD1306. U8G.
Датчик BME280 та BMP280
BME280 - це цифровий модуль, який містить у собі датчик атмосферного тиску, датчик температури і гігрометр. Модель іншого датчика - BMP280 дуже схожа на BME280 і відрізняється тим що не має гігрометра. Алгоритми роботи з цими датчиками майже ідентичні. Тобто, можна сказати що BMP280 + гігрометр = BME280. Ми протестуємо обидва датчики. Датчики BME280 та BMEP280 мають декілька режимів роботи (Sleep mode, Forced mode, Normal mode). Найбільш висока точність досягається при роботі у режимі Normal mode. Окремо для тиску, температури та вологості можна встановлювати oversampling (1,2,4,8,16). Чим більше oversampling тим точніше результати вимірювань. Але витрачається і більше часу для вимірювання. Також датчик має IIR_filter, який знижує шум у вихідних даних. Детальніше про ці режими можете прочитати у документації до BME280 та BMP280. Ми можемо не турбуватися про всі ці режими. Модуль bme280 NodeMCU за замовчуванням налаштує датчик для найбільш точної роботи. Корисні посилання: BME280 – датчик атмосферного тиску Повна документація по модулю NodeMCU bme280: https://nodemcu.readthedocs.io/en/master/en/modules/bme280/Функції роботи з BME280
NodeMCU має модуль для роботи з датчиком BME280. Цей модуль треба включити під час збірки NodeMCU (https://nodemcu-build.com). Оскільки BME280 використовує IIC( I2C), також треба включати модуль I2C.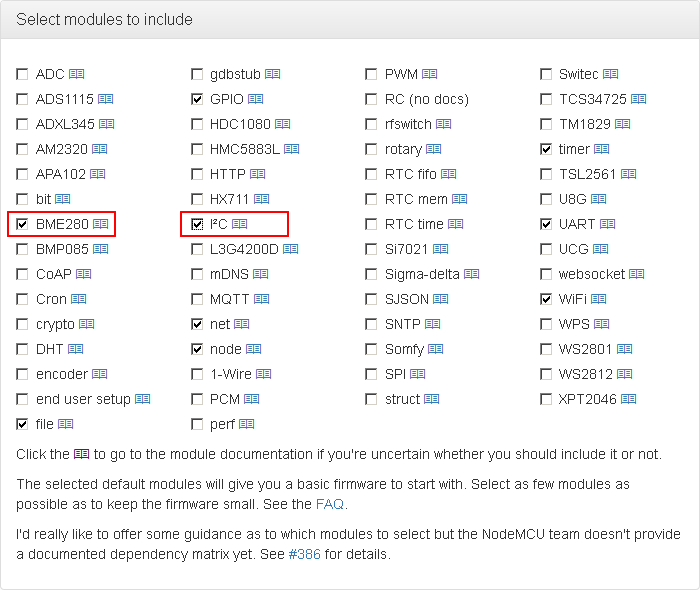 Ініціалізація датчика виконується функцією:
bme280.init(sda, scl, [temp_oss, press_oss, humi_oss, power_mode, inactive_duration, IIR_filter])
sda - SDA pin
scl - SCL pin
(optional) temp_oss - Controls oversampling of temperature data. Default oversampling is 16x.
(optional) press_oss - Controls oversampling of pressure data. Default oversampling is 16x.
(optional) humi_oss - Controls oversampling of humidity data. Default oversampling is 16x
(optional) sensor_mode - Controls the sensor mode of the device. Default sensor more is normal.
(optional) inactive_duration - Controls inactive duration in normal mode. Default inactive duration is 20ms.
(optional) IIR_filter - Controls the time constant of the IIR filter. Default fitler coefficient is 16.
(optional) cold_start - If 0 then the BME280 chip is not initialised. Usefull in a battery operated setup when the ESP deep sleeps and on wakeup needs to initialise the driver (the module) but not the chip itself. The chip was kept powered (sleeping too) and is holding the latest reading that should be fetched quickly before another reading starts (bme280.startreadout()). By default the chip is initialised.
Під час ініціалізації вказуються GPIO, які будуть використані для ліній SDA та SCL шини IIC. Решту параметрів вказувати не обов`язково. Зверніть увагу, що окремо виконувати ініціалізацію шини IIC не потрібно.
Примітка: bme280.init() описана як deprecated і буде видалена у наступних версіях NodeMCU. У нових версіях треба буде використовувати bme280.setup(), а ініціалізація IIC буде виконуватися окремо.
Для зчитування даних з датчика та обчислювання даних використовують наступні функції:
bme280.baro() - Читає датчик і повертає тиск повітря в гектопаскалях як ціле число, помножене на 1000, або нуль, коли зчитування не вдалося.
bme280.dewpoint() - Для заданої температури та відносної вологості температура роси у вигляді цілого числа, помноженого на 100.
bme280.humi() - Читає датчик і повертає відносну вологість повітря у відсотках як ціле число, помножене на 100 або нуль, коли зчитування не пройшло успішно.
bme280.qfe2qnh() - Для даної висоти перетворює тиск повітря на тиск повітря на рівні моря.
bme280.startreadout() - Починає зчитування (переводить датчик у forced режим).
bme280.temp() - Читає датчик і повертає температуру в градусах Цельсія як ціле число, помножене на 100.
Докладніше про функції роботи з датчиком можна прочитати тут:
https://nodemcu.readthedocs.io/en/master/en/modules/bme280/
Ініціалізація датчика виконується функцією:
bme280.init(sda, scl, [temp_oss, press_oss, humi_oss, power_mode, inactive_duration, IIR_filter])
sda - SDA pin
scl - SCL pin
(optional) temp_oss - Controls oversampling of temperature data. Default oversampling is 16x.
(optional) press_oss - Controls oversampling of pressure data. Default oversampling is 16x.
(optional) humi_oss - Controls oversampling of humidity data. Default oversampling is 16x
(optional) sensor_mode - Controls the sensor mode of the device. Default sensor more is normal.
(optional) inactive_duration - Controls inactive duration in normal mode. Default inactive duration is 20ms.
(optional) IIR_filter - Controls the time constant of the IIR filter. Default fitler coefficient is 16.
(optional) cold_start - If 0 then the BME280 chip is not initialised. Usefull in a battery operated setup when the ESP deep sleeps and on wakeup needs to initialise the driver (the module) but not the chip itself. The chip was kept powered (sleeping too) and is holding the latest reading that should be fetched quickly before another reading starts (bme280.startreadout()). By default the chip is initialised.
Під час ініціалізації вказуються GPIO, які будуть використані для ліній SDA та SCL шини IIC. Решту параметрів вказувати не обов`язково. Зверніть увагу, що окремо виконувати ініціалізацію шини IIC не потрібно.
Примітка: bme280.init() описана як deprecated і буде видалена у наступних версіях NodeMCU. У нових версіях треба буде використовувати bme280.setup(), а ініціалізація IIC буде виконуватися окремо.
Для зчитування даних з датчика та обчислювання даних використовують наступні функції:
bme280.baro() - Читає датчик і повертає тиск повітря в гектопаскалях як ціле число, помножене на 1000, або нуль, коли зчитування не вдалося.
bme280.dewpoint() - Для заданої температури та відносної вологості температура роси у вигляді цілого числа, помноженого на 100.
bme280.humi() - Читає датчик і повертає відносну вологість повітря у відсотках як ціле число, помножене на 100 або нуль, коли зчитування не пройшло успішно.
bme280.qfe2qnh() - Для даної висоти перетворює тиск повітря на тиск повітря на рівні моря.
bme280.startreadout() - Починає зчитування (переводить датчик у forced режим).
bme280.temp() - Читає датчик і повертає температуру в градусах Цельсія як ціле число, помножене на 100.
Докладніше про функції роботи з датчиком можна прочитати тут:
https://nodemcu.readthedocs.io/en/master/en/modules/bme280/
Приклад роботи з BME280
Схема підключення (для BME280 та BMP280 схема однакова):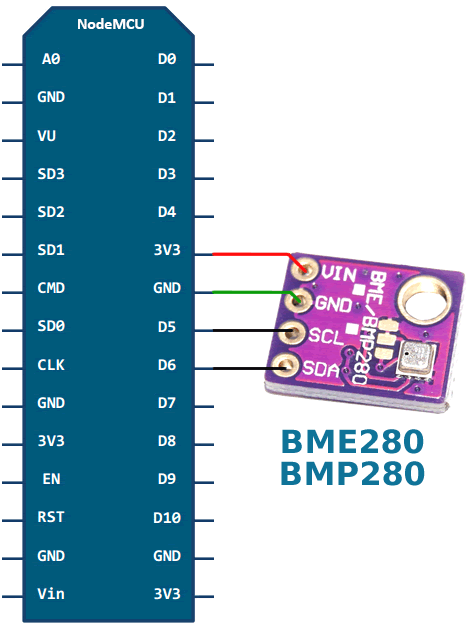 Приклад зчитування тиску, температури та вологості з датчика BME280:
Приклад зчитування тиску, температури та вологості з датчика BME280:
-- BME280 Example
bme280.init(5, 6)
local P, T = bme280.baro()
tmr.delay(100000)
local P, T = bme280.baro()
local H, t = bme280.humi()
T = T/100
H = H/1000
print (P, T, H)
Приклад роботи з BMP280
Спробуємо під`єднати датчик BMP280. BMP280 немає гігрометра, тому ми будемо зчитувати лише тиск і температуру:
-- BMP280 Example
bme280.init(5, 6)
local P, T = bme280.baro()
tmr.delay(100000)
local P, T = bme280.baro()
T = T/100
print (P, T)
BME280 + SSD1306
Тепер під`єднаємо до плати NodeMCU датчик BME280 і дисплей SSD1306 як вказано на схемі (нижче буде пояснення чому так підключати не рекомендується):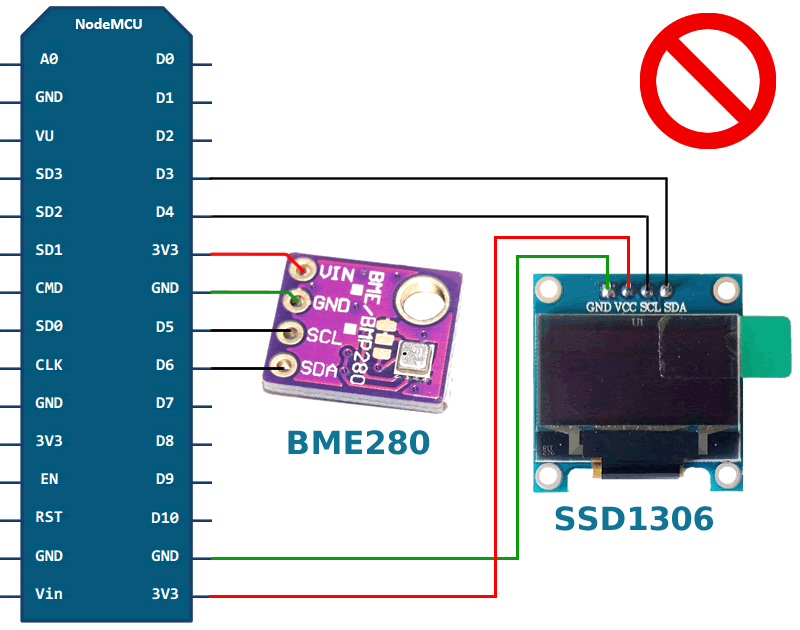 Зверніть увагу, що датчик bme280 і дисплей SSD1306 працюють по шині IIC, і ми підключаємо їх до різних GPIO виводів. NodeMCU дозволяє вказати на яких GPIO використовуються SDA, SCL лінії шини IIC. Але чи все так гаразд? Скільки окремих шин IIC ми можемо використати? NodeMCU дозволяє використовувати лише одну шину. І хоча функція i2c.setup має параметр id шини, він завжди має бути 0. Так сказано в документації до NodeMCU (https://nodemcu.readthedocs.io/en/master/en/modules/i2c/).
Тому нам доведеться кожного разу виконувати ініціалізацію шини IIC для датчика, зчитувати данні, потім виконувати ініціалізацію для дисплея, виводити данні і так по колу. Технічно це не дуже гарна ідея. Розглянемо приклад:
Зверніть увагу, що датчик bme280 і дисплей SSD1306 працюють по шині IIC, і ми підключаємо їх до різних GPIO виводів. NodeMCU дозволяє вказати на яких GPIO використовуються SDA, SCL лінії шини IIC. Але чи все так гаразд? Скільки окремих шин IIC ми можемо використати? NodeMCU дозволяє використовувати лише одну шину. І хоча функція i2c.setup має параметр id шини, він завжди має бути 0. Так сказано в документації до NodeMCU (https://nodemcu.readthedocs.io/en/master/en/modules/i2c/).
Тому нам доведеться кожного разу виконувати ініціалізацію шини IIC для датчика, зчитувати данні, потім виконувати ініціалізацію для дисплея, виводити данні і так по колу. Технічно це не дуже гарна ідея. Розглянемо приклад:
-- Don`t use this script in real project
-- it`s demonstrate wrong IIC using
-- Please see example4.lua
function round(num, numDecimalPlaces)
mult = 10^(numDecimalPlaces or 0)
return math.floor(num * mult + 0.5) / mult
end
--Init BME280
bme280.init(5, 6)
local P, T = bme280.baro()
tmr.delay(100000)
function read_and_show()
--Init BME280
bme280.init(5, 6)
local P, T = bme280.baro()
local H, t = bme280.humi()
T = T/100
H = H/1000
print (P, T, H)
-- IIC init for Display
local sda = 3
local scl = 4
local sla = 0x3c
i2c.setup(0, sda, scl, i2c.SLOW)
i2c.setup(0, sda, scl, i2c.SLOW)
-- Display init
local disp = u8g.ssd1306_128x64_i2c(sla)
disp:begin()
-- Set Font
disp:setFont(u8g.font_10x20)
disp:firstPage()
file.open("t.MONO", "r")
local xbm_data_t = file.read()
file.close()
file.open("h.MONO", "r")
local xbm_data_h = file.read()
file.close()
file.open("p.MONO", "r")
local xbm_data_p = file.read()
file.close()
repeat
disp:drawXBM( 8, 0, 12, 22, xbm_data_t )
disp:drawXBM( 7, 24, 15, 22, xbm_data_h )
disp:drawXBM( 0, 48, 29, 22, xbm_data_p )
disp:setFont(u8g.font_10x20)
disp:drawStr( 40, 16, round(T,1)..` C`)
disp:drawStr( 40, 38, round(H)..` %`)
disp:drawStr( 40, 60, round(P* 0.000750061683, 0)..` mmHg`)
until disp:nextPage() == false
xbm_data_t = nil
xbm_data_h = nil
xbm_data_p = nil
collectgarbage()
end
read_and_show()
-- Start timer
tmr.register(0, 5000, tmr.ALARM_AUTO, read_and_show)
tmr.start(0)
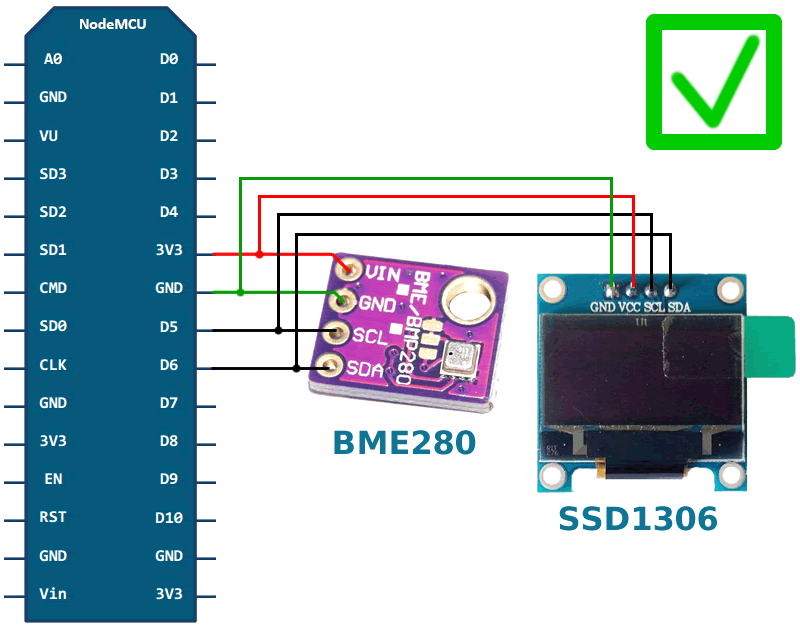 Примітка: На модулях дисплея і датчика вже встановлені підтягуючи резистори для ліній шини SDA і SCL, тому їх додавати не потрібно.
При такій схемі виконується ініціалізація всіх приладів лише один раз і подальша робота не вимагає пере-ініціалізації IIC. Таке підключення приладів, які працюють по шині IIC є коректним.
Приклад роботи датчика BME280 з дисплеєм SSD1306 та ESP8266:
Примітка: На модулях дисплея і датчика вже встановлені підтягуючи резистори для ліній шини SDA і SCL, тому їх додавати не потрібно.
При такій схемі виконується ініціалізація всіх приладів лише один раз і подальша робота не вимагає пере-ініціалізації IIC. Таке підключення приладів, які працюють по шині IIC є коректним.
Приклад роботи датчика BME280 з дисплеєм SSD1306 та ESP8266:
function round(num, numDecimalPlaces)
mult = 10^(numDecimalPlaces or 0)
return math.floor(num * mult + 0.5) / mult
end
-- IIC init
local sda = 5
local scl = 6
local sla = 0x3c
i2c.setup(0, sda, scl, i2c.SLOW)
--Init BME280
bme280.init(sda, scl)
--bme280.setup()
local P, T = bme280.baro()
tmr.delay(100000)
-- Display init
local disp = u8g.ssd1306_128x64_i2c(sla)
disp:begin()
-- Set Font
disp:setFont(u8g.font_10x20)
function read_and_show()
local P, T = bme280.baro()
local H, t = bme280.humi()
T = T/100
H = H/1000
print (P, T, H)
disp:firstPage()
file.open("t.MONO", "r")
local xbm_data_t = file.read()
file.close()
file.open("h.MONO", "r")
local xbm_data_h = file.read()
file.close()
file.open("p.MONO", "r")
local xbm_data_p = file.read()
file.close()
repeat
disp:drawXBM( 8, 0, 12, 22, xbm_data_t )
disp:drawXBM( 7, 24, 15, 22, xbm_data_h )
disp:drawXBM( 0, 48, 29, 22, xbm_data_p )
disp:setFont(u8g.font_10x20)
disp:drawStr( 40, 16, round(T,1)..` C`)
disp:drawStr( 40, 38, round(H)..` %`)
disp:drawStr( 40, 60, round(P* 0.000750061683, 0)..` mmHg`)
until disp:nextPage() == false
xbm_data_t = nil
xbm_data_h = nil
xbm_data_p = nil
collectgarbage()
end
read_and_show()
-- Start timer
tmr.register(0, 5000, tmr.ALARM_AUTO, read_and_show)
tmr.start(0)
bme280.init(5, 6)
i2c.setup(0, 5, 6, i2c.SLOW)
bme280.setup()
Дивись також:
- ESP8266 NodeMCU Перше знайомство. Робимо WiFi розетку
- ESP8266 NodeMCU. PWM
- ESP8266 NodeMCU. ADC
- ESP8266 NodeMCU. timer, rtc, SNTP, cron
- ESP8266 NodeMCU. файлова система, SD Card
- ESP8266 NodeMCU. UART
- GPS-трекер на базі ESP8266
- GPS-трекер + Дисплей SSD1306
- ESP8266 NodeMCU. SSD1306. U8G
- ESP-01 (ESP8266) upgrade flash memory to 4MB
- ESP8266 NodeMCU. I2C. BME280/
- Метеостанція на ESP8266
Недавні записи
- CRSF to PWM
- U-FOC PC Monitor для Chrome browser
- Фільтрація Back-EMF. Безсенсорні BLDC мотори
- Text to speech. Українська мова
- LCD Display ST7567S (IIC)
- Розпізнавання мови (Speech recognition)
- Selenium
- Комп'ютерний зір (Computer Vision)
- Деякі думки про точність вимірювань в електроприводі
- Датчики Холла 120/60 градусів
Tags
bluetooth bldc nodemcu tim max1674 eeprom led avr hih-4000 brushless programmator mpu-6050 usart examples smd sensors piezo rs-232 motor html git meteo bme280 gps bkp encoder java-script raspberry-pi websocket esp8266 books solar eb-500 atmega mongodb gpio sms css pwm ethernet pmsm st-link capture dma stm32 watchdog lcd rfid python uart battery dc-dc soldering timer ssd1331 wifi nvic dht11 docker i2c 3d-printer adc bmp280 flash rtc servo barometer remap exti mpx4115a web flask ngnix usb displays foc ssd1306 mpu-9250 options
Архіви