Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
Мостовая схема ключей
Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени "+" или "-" питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме: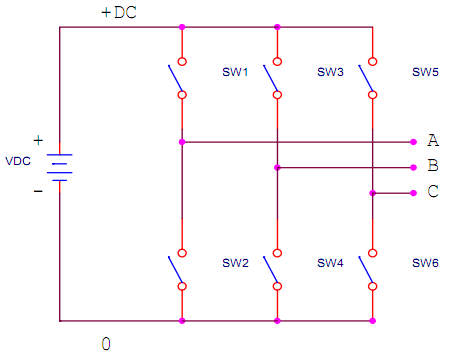 Замыкая ключ SW1 подаем "+" на фазу А, а замыкая SW6 подаем "-" на фазу С. Таким образом, ток потечет от "+" батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2. В этом случае ток потечет от "+" батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
Замыкая ключ SW1 подаем "+" на фазу А, а замыкая SW6 подаем "-" на фазу С. Таким образом, ток потечет от "+" батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2. В этом случае ток потечет от "+" батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
Диаграмма включения ключей
Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков.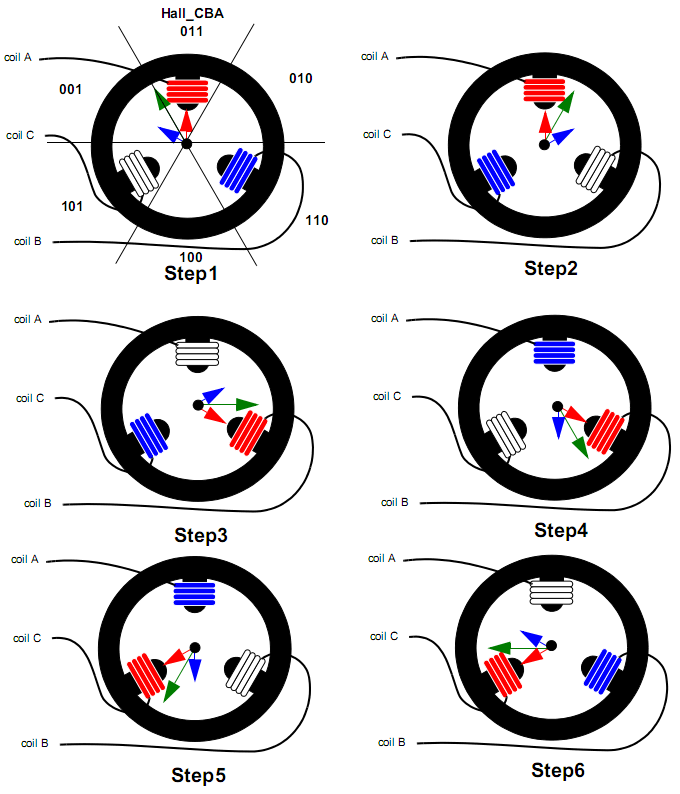 Временная диаграмма:
Временная диаграмма:
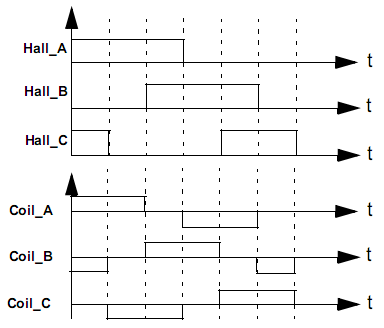
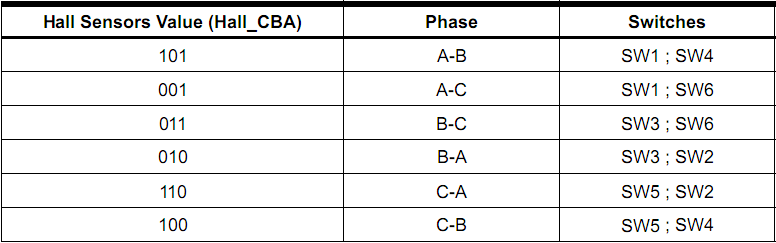
Таблица включения ключей в зависимости от сигналов датчиков Холла:
Анимированная демонстрация работы 4 полюсного двигателя:
ШИМ (PWM), частота, переходные процессы
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью: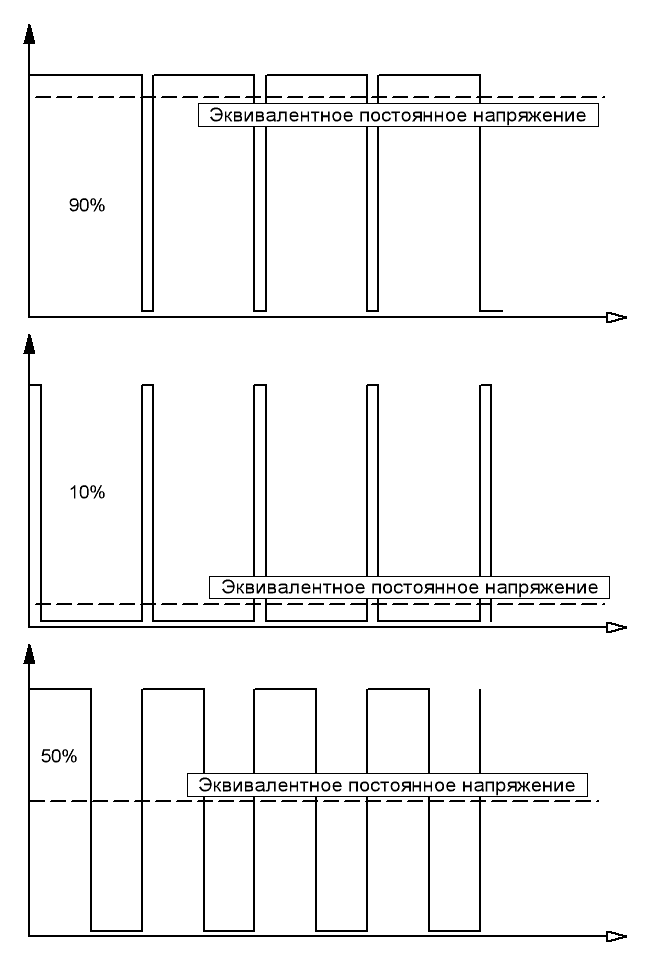 Таким образом, изменяется действующее напряжение от нулевого до напряжения питания. Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
Таким образом, изменяется действующее напряжение от нулевого до напряжения питания. Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:
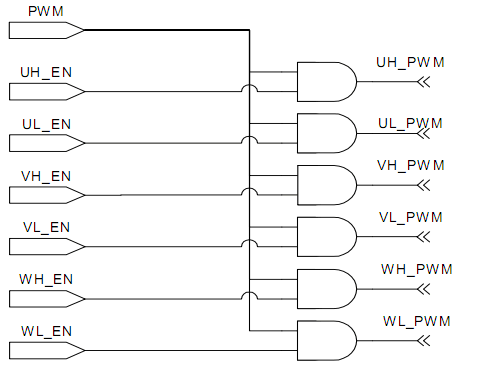 Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло. Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
Для уменьшения потерь вследствие переходных процессов на ключах ШИМ сигнал можно подавать только на нижние или только на верхние ключи. Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:P=R*I2
где:
P - теряемая мощность, которая выделяется в виде тепла R - прямое сопротивление открытого ключа I - ток, протекаемый через ключ.
Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 1002 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 502 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.
Угол опережения фаз (timing)
При приложении напряжения к обмотке двигателя, ток в обмотке не может вырасти мгновенно, поскольку обмотка двигателя представляет собой индуктивность. От момента подачи напряжения до достижения тока максимального значения пройдет некоторое время. Аналогично при снятии напряжения понадобится некоторое время пока ток будет уменьшаться до нуля. Это время зависит от индуктивности обмотки двигателя и других конструктивных особенностей двигателя. Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом.Чтобы компенсировать эту задержку управляющий сигнал на ключи подают с опережением. Опережение управляющего сигнала выражают в угле опережения. Угол опережения может быть от 0 до 30 градусов. Речь идет об электрических градусах (см. Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя). Угол опережения может отличаться для каждой модели двигателя. Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей. На малых скоростях точность установки угла опережения не столь критична.
Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
Статті по безколекторним двигунам:
- Бесколлекторный мотор постоянного тока. Что это такое?
- Устройство бесколлекторного мотора
- Управление бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Управление бесколлекторными моторами без бездатчиков (Sensorless BLDC)
- Запуск бесколлекторного мотора без бездатчиков (Sensorless BLDC)
- Определение положения ротора бесколлекторного мотора в остановленном состоянии
- Регулятор бесколлекторного мотора. Структура (ESC)
- Схема регулятора бесколлекторного мотора (Схема ESC)
- Силова частина регулятора BLDC двигунів
- Література по безколекторним двигунам.
- Безколекторні двигуни. Приклади програм для мікроконтролера
- Схема регулятора BLDC на STM32
- STM32. Приклад. Керування безколекторним двигуном (BLDC)
- STM32. Приклад. Керування PMSM. Приклади програм
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление (російською)
Ну когда же будет продолжение?
Через недельку. Лето... сделал себе небольшие каникулы :)
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви