Електроніка, схеми, плати, статті - сторінка 22
« ‹ 20 21
Определение положения ротора в остановленном состоянии двигателя

В этой статье предлагается решение для определения положения ротора для большинства типов бесколлекторных двигателей постоянного тока с постоянными магнитами.
За основу этой статьи взята статья Sensorless Detection of Rotor Position of PMBL Motor at Stand Still Авторы: Roustiam Chakirov, Yuriy Vagapov, and Andreas Gaede
Я позволил себе ее вольно перевести с некоторыми упрощениями и дополнениями, добавив в конце пример реализации и небольшой видеоотчет полученных результатов.
Этот метод обеспечивает надежный и быстрый запуск бесколлекторного двигателя, не зависит от применения датчиков и пригоден для разных схем управления. Метод основан на обнаружении нелинейностей в обмотках статора двигателя при различных положениях постоянных магнитов ротора (имеется ввиду пока мотор не вращается). Описанное решение предполагает включение обмоток статора по схеме звезда.
COMRADE Easy - барометрический вариометр-альтиметр

COMRADE Easy - цифровой барометрический вариометр-альтиметр с черно-белым графическим дисплеем, встроенным аккумулятором. COMRADE Easy специально создан для пилотов парапланов. Зарядка прибора осуществляется через microUSB разъем от компьютера или зарядного устройства.
СКАЧАТЬ схему, плату, прошивку Comrade Easy
Bluetooth модуль HC-07

Bluetooth используется на многих современных устройствах. Технология получила широкое применение. Хотя ей много лет, только недавно появились Bluetooth модули действительно по разумной цене. Китайские производители выпустили целую серию Bluetooth-модулей: HC-03, HC-04, HC-05, HC-06, HC-07, HC-08, HC-09. К сожалению, документация на них не всегда соответствует действительности (китайские производители частенько этим грешат). Мне достался HC-07. Я расскажу об особенностях его применения.
Расчет плавких вставкок для предохранителей

Плавкие вставки для предохранителей всегда перегорают в неподходящий момент. И что мы делаем? Конечно! Делаем из него "жука". Если это сделать неправильно, можно навлечь на себя беду. Для того, чтобы правильно и безопасно восстановить плавкую вставку нужно всего лишь выбрать правильный диаметр используемой проволоки. Ниже приведен расчет диаметра провода для плавких вставок предохранителей по таблице.
Замена Ni-MH на LiFePO4
Замена Ni-MH аккумуляторов.
Стилус и перчатки для смартфона своими руками

Зима не за горами. Владельцы смартфонов с емкостными экранами вскоре будут озадачены использованием своих девайсов на улице. Всем известная проблема - емкостной экран не реагирует на прикосновения рук в перчатках, может быть решена самостоятельно с минимальными затратами. Конечно, можно купить специальные перчатки или специальный стилус для емкостного экрана, но мы все это сможем сделать их сами, потратив на работу не более 5 минут.
Обновленный GPS модуль EB-500
В последней приобретенной партии GPS модулей EB-500 обнаружены некоторые доработки. GPS координаты теперь содержат на два значащих знака больше, чем в раньше. Пока не могу сказать вызвано ли это увеличением точности GPS модуля EB-500, но библиотеку gps.c пришлось корректировать. Пока поставил "костыль" в функции gps_get_long_value. Теперь она выглядит так:
Запуск бездатчикового бесколлекторного двигателя (Sensorless BLDC)
")
В предыдущей статье(Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC) мы рассмотрели алгоритм коммутаций для бесколлекторного бездатчикового двигателя постоянного тока при вращающемся роторе. Сегодня рассмотрим простой способ запуска бесколлекторного бездатчикового двигателя.
Солнечный тепловой концентратор. Солнечная энергетика.

Альтернативная энергетика интересует все большее количество великих умов. Я - не исключение. :)
Все началось с простого вопроса: "А можно ли бесколлекторный двигатель превратить в генератор?" -Можно. А зачем? -Сделать ветрогенератор.
Ветряк для выработки электроэнергии - не совсем удобное решение. Переменная сила ветра, зарядные устройства, аккумуляторы, инверторы, много не копеечного оборудования. В упрощенной схеме ветряк на «отлично» справляется с подогревом воды. Ибо нагрузка - тен, а он абсолютно не требователен к параметрам подаваемой на него электроэнергии. Можно избавиться от сложной дорогой электроники. Но расчеты показали значительные затраты на конструкцию, чтобы раскрутить генератор 500 Ватт. Мощность, которую несет в себе ветер, рассчитывается по формуле P=0,6*S*V3, где: P - мощность, Ватт S - площадь, м2 V - скорость ветра, м/с
Ветер, дующий на 1 м2 со скоростью 2 м/с «несет» в себе энергию 4,8 Ватт. Если скорость ветра увеличится до 10 м/с, то мощность возрастет до 600 Ватт. У самых лучших ветрогенераторов КПД 40-45%. С учетом этого для генератора мощностью 500 Ватт при ветре, скажем 5 м/с. Потребуется площадь, ометаемая винтом ветрогенератора, около 12 кв.м. Что соответствует винту диаметром почти 4 метра! Много денег - мало толку. Добавить сюда необходимость получения разрешения (ограничение по шумности). Кстати, в некоторых странах установку ветряка нужно согласовывать даже с орнитологами.
Но тут я вспомнили о Солнышке! Оно нам дарит очень много энергии. Об этом я впервые задумался после полета над замерзшим водохранилищем. Когда увидел массу льда толщиной более метра и размерами 15 на 50 километров, я подумал: "Это же сколько льда! Сколько его надо греть, чтобы расплавить!?" И все это сделает Солнце за полтора десятка дней. В справочниках можно найти плотность энергии, которая достигает поверхности земли. Цифра около 1 киловатт на метр квадратный звучит заманчиво. Но это на экваторе в ясный день. Насколько реально утилизировать солнечную энергию для хозяйственных нужд в наших широтах (центральная часть Украины), используя доступные материалы?
Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
Существуют бесколлекторный двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз подключен "+" к другой "-" питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на свободной фазе через нулевую точку (половину питающего напряжения). Т.е. нужно отследить момент, когда напряжение на свободной фазе сравняется со средней точкой. Разумеется, для работы этого метода двигатель должен вращаться. Этот метод хорошо работает при сравнительно высоких оборотах двигателя. При низких оборотах наводимая ЭДС может оказаться недостаточной для четкого определения положения ротора. Тем не менее, этот метод применяется. Один из методов определения положения ротора при невращающемся двигателе будет рассмотрен в следующей статье. Способы запуска беcколлекторного бездатчикового двигателя также будут рассматриваться в следующей статье.
Отключил комментарии
Комментарии в статьях отключены. Если у Вас есть вопросы касательно публикаций, обращайтесь на e-mail: [email protected] Причина отключения: жалоба компании, предоставляющей хостинг, на высокую нагрузку, вызванную атаками на этот сайт. Теперь комментарии можно будет отправлять на протяжении 14 дней после публикации статьи, после чего возможность комментировать будет отключаться.
GPS. Расчет дистанции между двумя точками по GPS координатам. Расчет курса на точку.
Читайте начало в статье GPS модуль EB-500 и ATMega
При использовании GPS модуля появилась необходимость вычислить расстояние от текущего положения до заданной точки. Фактически это вычисление расстояния по двум GPS координатам. Поскольку, в этом вопросе у меня было недостаточно знаний, пришлось немного почитать. Рекомендую для прочтения эти статьи: Системы геодезических координат или "Что такое датум?"
Вычисление постоянного азимута и длины линии румба между двумя точками для геодезических координат Сравнение расчетов длин и азимутов для разных способов вычисления
Даже если Вы не будете глубоко вникать в суть этих статей, это поможет Вам осознать суть некоторых проблем и получить ответы на большинство вопросов, связанных с точностью вычислений. В одной из этих статей приводится алгоритм, который и был адаптирован для библиотеки gps.c.
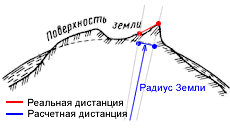
При вычислении применяются упрощения. Предполагается, что точки находятся на сфере с радиусом 6372795 метров. Следует понимать, что если точки находятся на разных высотах, то вычисленное расстояние будет отличаться от реального, поскольку разница высот не учитывается.
« ‹ 20 21
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви