Тег: brushless - сторінка 3
‹ 1 2
Деталі регулятора електроприводу
Деталі електроприводу автомобіля Chevrolet Volt. З чого складається регулятор електромобіля. Датчики струму, силові ключі (IGBT транзистори)...
Вимірювання струмів в трифазних безколекторних моторах
Вимірювання трифазних струмів в безколекторних моторах на прикладі велосипедного мотор колеса. Результати використання бюджетних датчиків струму на ефекті Холла ACS712.
Безколекторні мотори "на пальцях"

Докладно про безколекторні мотори. Принцип роботи, синхронних та безколекторних двигунів.
Безколекторні двигуни. Приклади на C
Ці приклади можна розглядати тільки як демонстрацію алгоритмів керування безколекторними двигунами. Для доведення їх до кінцевої технічної реалізації потрібно, як мінімум, додати схеми захисту. Ці приклади розраховані на керування двигунами з напругою живлення від 12 до 24 Вольт. При вищій напрузі живлення доведеться вносити зміни у схеми. У схемах передбачена можливість подачі PWM сигналу (за допомогою перемичок) на верхні та/або нижні ключі. Для керування бездатчиковими двигунами це може відіграти важливу роль.
Sensored BLDC
| Приклад керування безколекторним двигуном з датчиками Холла
Приклад, написаний на GCC 3.4.6 для мікроконтролера Atmega168 Містить: схему, приклад коду на С. |
 |
|
Безколекторні двигуни. Література.
Окрім статей про безколекторні двигуни можу порекомендувати наступну літературу
(нажаль, російською або українською я майже нічого не знайшов):
Design and Prototyping Methods for Brushless Motors and Motor Control
Shane W. Colton
Силова частина регулятора BLDC двигунів

Проектування силової частини зазвичай починають з вибору ключів. Найбільш підходящі для цього є польові MOSFET транзистори. Вибір силових транзисторів робиться на підставі даних про максимальний можливий струм та напругу живлячої мережі двигуна.
Вибір силових транзисторів
Транзистори повинні витримувати робочій струм з деяким запасом. Тому вибирають польові транзистори с робочим струмом в 1.2-2 рази більшим, аніж максимальний струм двигуна. В характеристиках польових транзисторів може бути вказано декілька значень струму для різних режимів. Інколи вказують струм, котрий може витримувати кристал Id (Silicon Limited) (він більший) та струм, обмежений можливостями корпусу транзистора Id(Package Limited) (він менший). Наприклад:
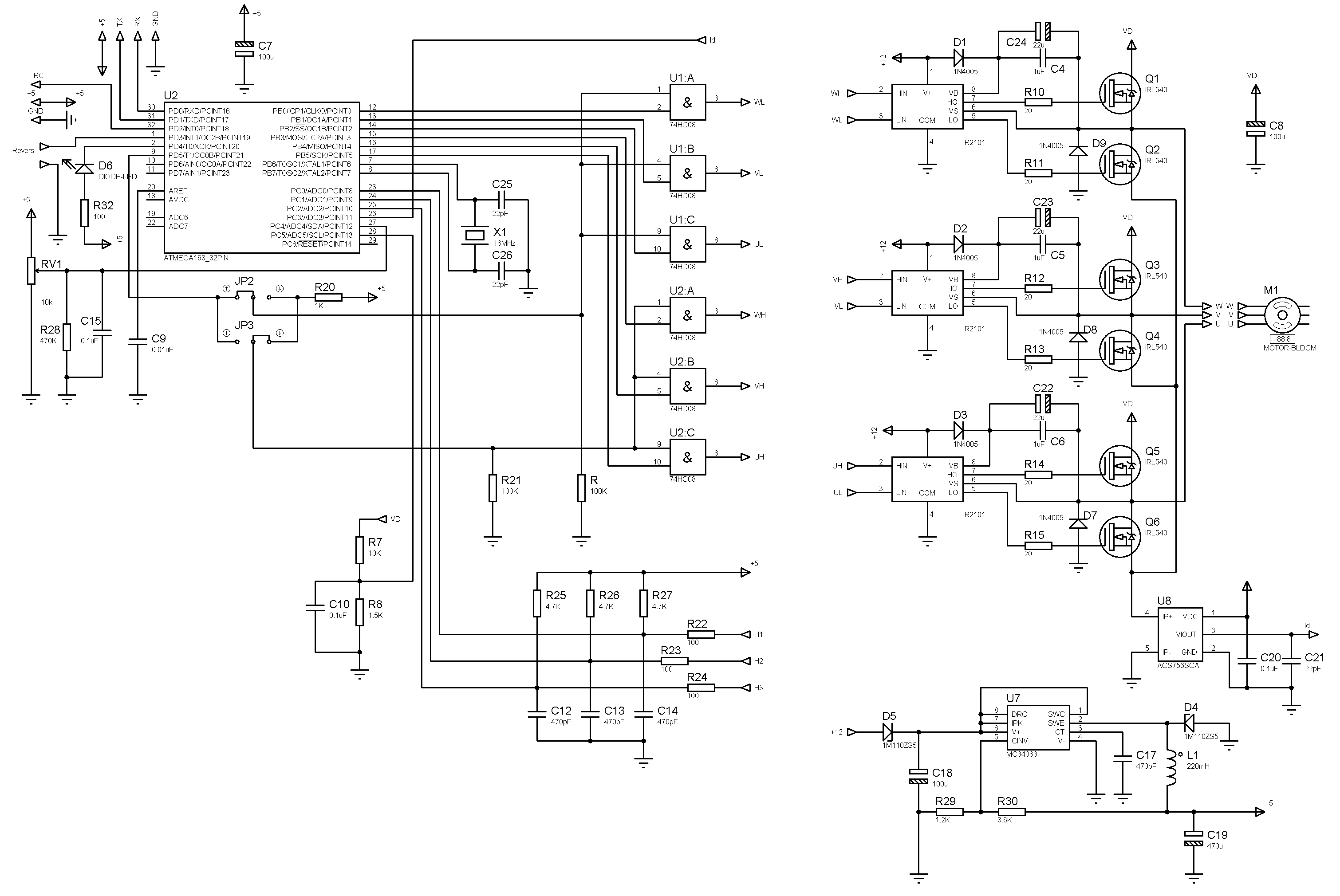
Схема регулятора скорости бесколлекторного двигателя (ESC)
")
Схема условно разделена на две части: левая - микроконтроллер с логикой, правая - силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер - ATMEGA168. Гурманы могут сказать, что хватило бы и ATMEGA88, а AT90PWM3 - это было бы "вааще по феншую". Первый регулятор я как раз делал "по феншую". Если у Вас есть возможность применять AT90PWM3 - это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168.
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными "калибрами" бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
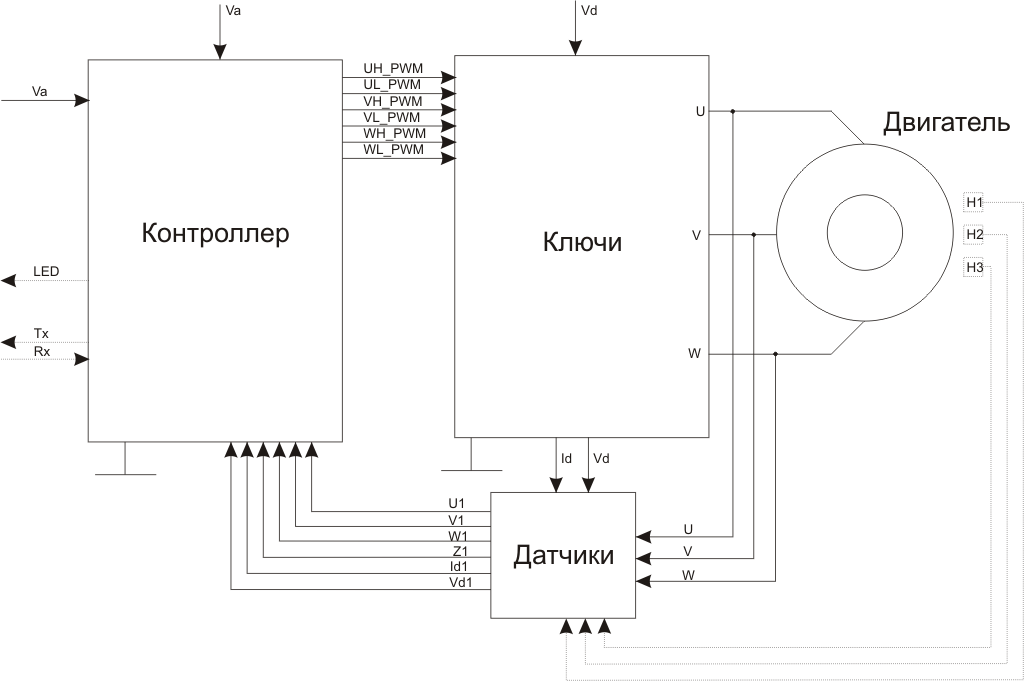
Структура регулятора скорости бесколлекторного двигателя (ESC)
Перед тем, как приступить непосредственно к разработке схемы регулятора, составим его блок-схему. Это упростит последующий выбор элементной базы.
Регулятор скорости бесколлекторного двигателя (ESC - Electronic Speed Controller) иногда называют контроллер бесколлекторного двигателя или привод бесколлекторного двигателя.
Условно разделим регулятор на следующие модули: Модуль контроллера - принимает задающие сигналы, сигналы датчиков, выдает управляющие сигналы на ключи Модуль силовых ключей - управляет силовыми ключами Модуль датчиков - совокупность различных датчиков и схем согласования.
Определение положения ротора в остановленном состоянии двигателя

В этой статье предлагается решение для определения положения ротора для большинства типов бесколлекторных двигателей постоянного тока с постоянными магнитами.
За основу этой статьи взята статья Sensorless Detection of Rotor Position of PMBL Motor at Stand Still Авторы: Roustiam Chakirov, Yuriy Vagapov, and Andreas Gaede
Я позволил себе ее вольно перевести с некоторыми упрощениями и дополнениями, добавив в конце пример реализации и небольшой видеоотчет полученных результатов.
Этот метод обеспечивает надежный и быстрый запуск бесколлекторного двигателя, не зависит от применения датчиков и пригоден для разных схем управления. Метод основан на обнаружении нелинейностей в обмотках статора двигателя при различных положениях постоянных магнитов ротора (имеется ввиду пока мотор не вращается). Описанное решение предполагает включение обмоток статора по схеме звезда.
Запуск бездатчикового бесколлекторного двигателя (Sensorless BLDC)
")
В предыдущей статье(Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC) мы рассмотрели алгоритм коммутаций для бесколлекторного бездатчикового двигателя постоянного тока при вращающемся роторе. Сегодня рассмотрим простой способ запуска бесколлекторного бездатчикового двигателя.
Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
Существуют бесколлекторный двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз подключен "+" к другой "-" питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на свободной фазе через нулевую точку (половину питающего напряжения). Т.е. нужно отследить момент, когда напряжение на свободной фазе сравняется со средней точкой. Разумеется, для работы этого метода двигатель должен вращаться. Этот метод хорошо работает при сравнительно высоких оборотах двигателя. При низких оборотах наводимая ЭДС может оказаться недостаточной для четкого определения положения ротора. Тем не менее, этот метод применяется. Один из методов определения положения ротора при невращающемся двигателе будет рассмотрен в следующей статье. Способы запуска беcколлекторного бездатчикового двигателя также будут рассматриваться в следующей статье.
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
")
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
‹ 1 2
Tags
bme280 mpu-6050 encoder examples adc lcd python wifi bluetooth rtc pwm piezo ngnix watchdog books rfid web st-link eeprom bkp usart led nodemcu flash websocket uart 3d-printer options html git meteo gpio soldering flask tim servo rs-232 raspberry-pi programmator stm32 sms dma battery dht11 hih-4000 css ssd1331 pmsm bmp280 avr brushless motor usb barometer max1674 displays esp8266 docker java-script ssd1306 i2c capture nvic bldc atmega exti ethernet timer mpu-9250 smd mpx4115a sensors dc-dc mongodb eb-500 remap solar foc gps
Архіви