Video
Відео - U-FOC. Регулятор для безколекторних моторів на STM32G431

U-FOC. Регулятор для безколекторних моторів на STM32G431
Розповідаю про проєкт U-FOC та новій регулятор для безколекторних моторів на мікроконтроллері STM32G431
Про U-FOC
https://blog.avislab.com/u-foc/about/
U-FOC git
https://git.avislab.com/andre/U-FOC
CRSF to PWM
https://blog.avislab.com/crsf-to-pwm/
https://git.avislab.com/andre/STM32G030_CRSF_TO_PWM
Приклади для STM32G431:
https://github.com/avislab/STM32G431_HAL_Examples
U-FOC PC Monitor:
https://blog.avislab.com/uploads/u-foc-monitor/#/
Відео - FOC. Polar Coordinates
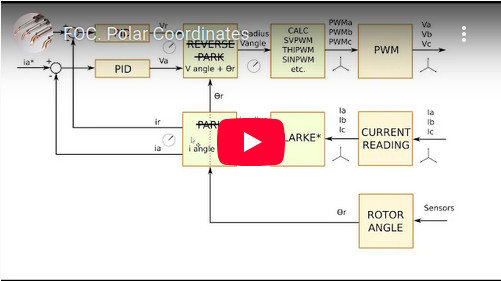
Використання полярних координат у векторному керуванні двигунами. У цьому відео я "топлю" за використання полярних координат у векторному керуванні двигунами. Цей підхід простіший у реалізації і працює швидше.
Попереднє відео FOC & Polar coordinates:
https://youtu.be/I7q4bYjqLqg
Відео - Tiny PnP machine
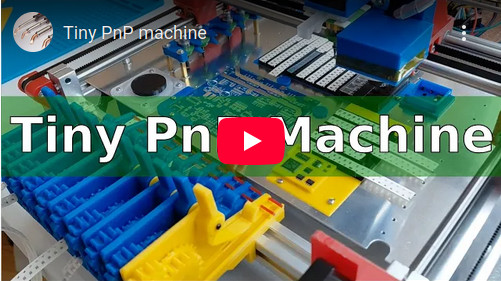
Невеличкий станок - встановлювач SMD компонентів. Розроблений власноруч. Програмне забезпечення розроблено самостійно.
Відео - Tiny PnP machine
Простий компактний Pick and place - станочок початкового хобійного рівня. На відео встановлює SMD компоненти розміром 0603 (0.85 x 1.6 mm). Не має камер, як в OpenPnP. Не підходить для серійної/дрібносерійної роботи. Перший тест пройшов не дуже вдало - станок впустив один елемент, один не захопив (треба чітко коригувати висоти компонентів).
Цей станок згодом було перероблено. Він вже має поворотну голову, змінні сопла, верхню та нижню камери з машинним зором, маленьку помпу. Розроблено власне програмне забезпечення.
Відео - Back EMF BLDC двигуна

Осцилограми BLDC мотора. Розбираймось що таке зворотна електрорушійна сила.
Посилання де можна завантажити книжку "Brushless Permanent Magnet Motor Design": https://blog.avislab.com/BrushlessPermanentMagnetMotorDesign-book/
Відео - DC-DC для IGBT драйверів ізольований 2 W +15 -8 вольт

Відео про DC-DC для IGBT драйверів ізольований 2 W +15 -8 вольт.
U-FOC. Стабілізація положення

Приклад використання API для реалізації стабілізації положення валу мотора (серворежим). Приклад для двоконтурного і триконтурного керування.
U-FOC. API (Application Programming Interface)
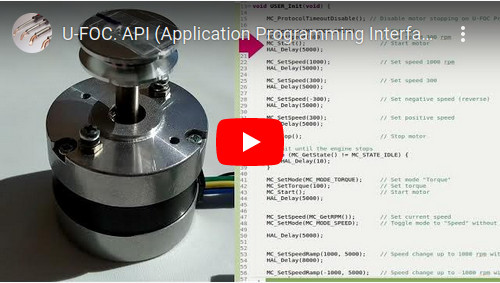
Приклад використання API (Application Programming Interface) проєкту U-FOC. Програмне керування обертів мотора. Керування обертами мотора потенціометром.
U-FOC. Що вміє Базовий приклад
Це відео про базовий приклад проекту U-FOC. U-FOC - Це моя власна реалізація векторного керування безколекторними двигунами, яка у своїй матиматиці використовує обчислення у полярних координатах.
FOC - своя реалізація векторного керування. Підбиваю підсумки 2022 року
FOC (Field Oriented Control) using Polar Coordinates. Своя реалізація векторного керування безколекторними моторами у якій використовуються полярні координати. Підбиваю підсумки що зроблено за 2022 рік.
Конструктор регуляторів моторів. Підбиваю підсумки 2022 року.
Конструктор регуляторів моторів. За цей рік зроблено не багато. Але проєкт не вмер. Невеличкий рух є, поступово буде розвиватися цей напрямок. Можливо будуть цікаві відео про окремі блоки.
Сторінка зі схемами, платами:
Відео по темі:
Чому трифазні мотори стали такими популярними?
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви