Тег: motor - сторінка 2
‹ 1
STM32 Motor control SDK - керування оборотами мотора за допомогою потенціометра 📑
Векторне управління безколекторним мотором. Як програмно керувати обертами мотора за допомогою потенціометра. X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
STM32 Motor control SDK - програмне керування обертами мотора

Векторне управління безколекторним мотором. Як програмно керувати обертами мотора за допомогою X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
STM32 Motor control SDK - як створити перший проект

Векторне управління безколекторним мотором. Створення проекту і запуск бесколлекторного мотора за допомогою X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
Вимірювання моменту мотора

Відео про Метод вимірювання моменту мотора. Пристрій для вимірювання моменту мотора і побудови графіків потужності, оборотів, КПД. Використання тензодатчика для побудови електронного пристрою для вимірювання моменту.
Розрахунок потужності BLDC двигуна

Відео про те, як оцінити потужність саморобного BLDC двигуна.
Розрахунок потужності BLDC двигуна (приблизний):
https://blog.avislab.com/uploads/motor/
BLDC двигун своїми руками
Відео про те, як я від "нічого робити" ізваяв BLDC двигун. Цей безколекторний двигун був зроблений зі статора автомобільного генератора.
Двигун не має ніякої технічної цінності і робився для розваги.
Векторне управління. Фазні і координатні перетворення
Навіщо потрібні перетворення Кларк, пряме і зворотне перетворення Парка.
Безколекторні двигуни. Приклади на C
Ці приклади можна розглядати тільки як демонстрацію алгоритмів керування безколекторними двигунами. Для доведення їх до кінцевої технічної реалізації потрібно, як мінімум, додати схеми захисту. Ці приклади розраховані на керування двигунами з напругою живлення від 12 до 24 Вольт. При вищій напрузі живлення доведеться вносити зміни у схеми. У схемах передбачена можливість подачі PWM сигналу (за допомогою перемичок) на верхні та/або нижні ключі. Для керування бездатчиковими двигунами це може відіграти важливу роль.
Sensored BLDC
| Приклад керування безколекторним двигуном з датчиками Холла
Приклад, написаний на GCC 3.4.6 для мікроконтролера Atmega168 Містить: схему, приклад коду на С. |
 |
|
Безколекторні двигуни. Література.
Окрім статей про безколекторні двигуни можу порекомендувати наступну літературу
(нажаль, російською або українською я майже нічого не знайшов):
Design and Prototyping Methods for Brushless Motors and Motor Control
Shane W. Colton
Силова частина регулятора BLDC двигунів

Проектування силової частини зазвичай починають з вибору ключів. Найбільш підходящі для цього є польові MOSFET транзистори. Вибір силових транзисторів робиться на підставі даних про максимальний можливий струм та напругу живлячої мережі двигуна.
Вибір силових транзисторів
Транзистори повинні витримувати робочій струм з деяким запасом. Тому вибирають польові транзистори с робочим струмом в 1.2-2 рази більшим, аніж максимальний струм двигуна. В характеристиках польових транзисторів може бути вказано декілька значень струму для різних режимів. Інколи вказують струм, котрий може витримувати кристал Id (Silicon Limited) (він більший) та струм, обмежений можливостями корпусу транзистора Id(Package Limited) (він менший). Наприклад:
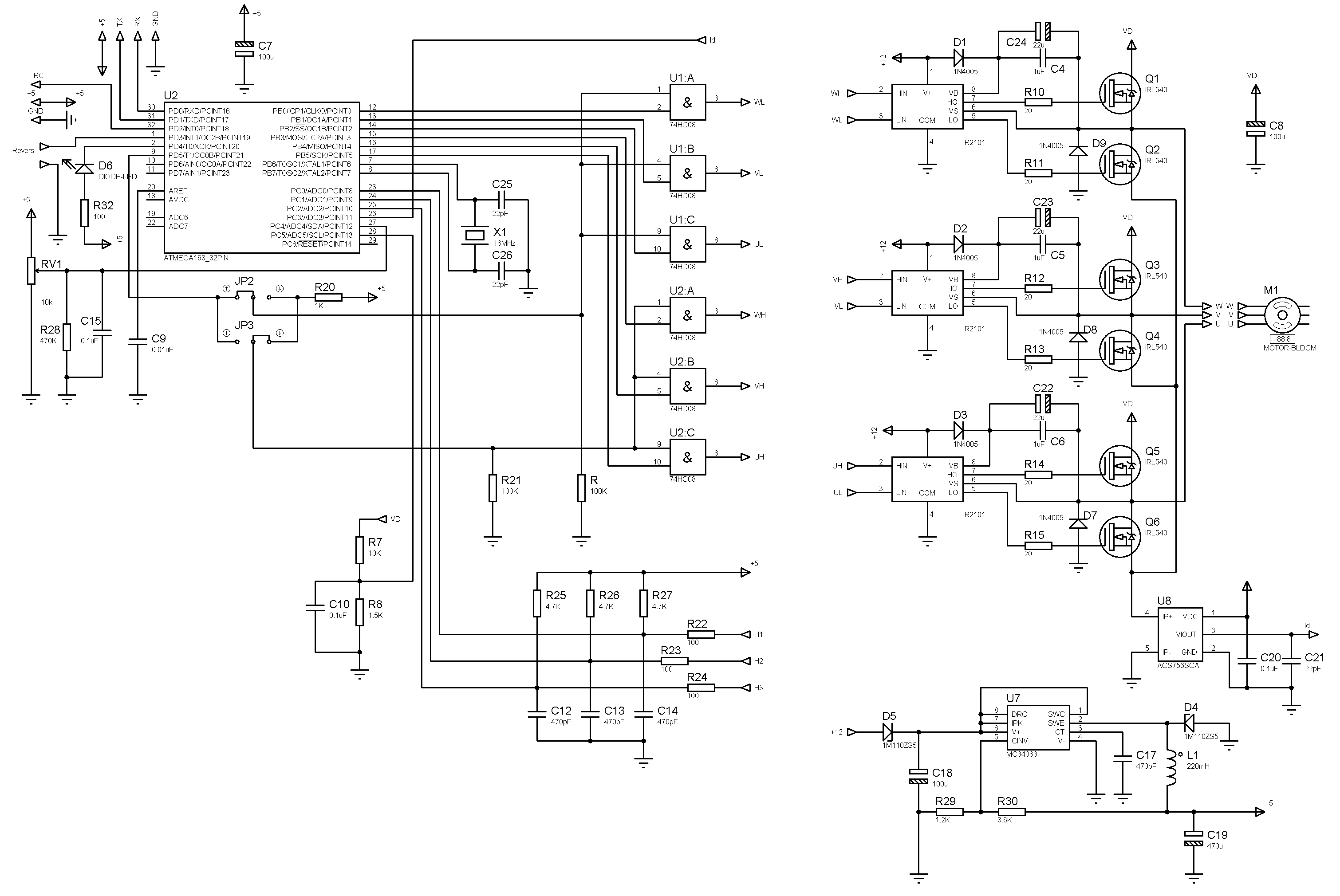
Схема регулятора скорости бесколлекторного двигателя (ESC)
")
Схема условно разделена на две части: левая - микроконтроллер с логикой, правая - силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер - ATMEGA168. Гурманы могут сказать, что хватило бы и ATMEGA88, а AT90PWM3 - это было бы "вааще по феншую". Первый регулятор я как раз делал "по феншую". Если у Вас есть возможность применять AT90PWM3 - это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168.
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными "калибрами" бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
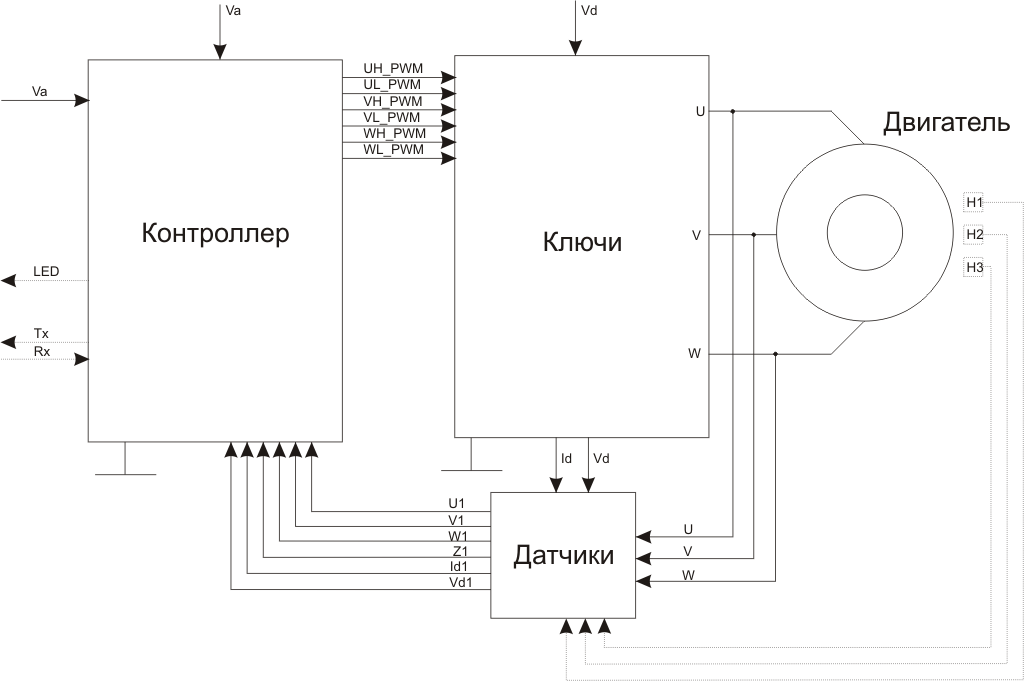
Структура регулятора скорости бесколлекторного двигателя (ESC)
Перед тем, как приступить непосредственно к разработке схемы регулятора, составим его блок-схему. Это упростит последующий выбор элементной базы.
Регулятор скорости бесколлекторного двигателя (ESC - Electronic Speed Controller) иногда называют контроллер бесколлекторного двигателя или привод бесколлекторного двигателя.
Условно разделим регулятор на следующие модули: Модуль контроллера - принимает задающие сигналы, сигналы датчиков, выдает управляющие сигналы на ключи Модуль силовых ключей - управляет силовыми ключами Модуль датчиков - совокупность различных датчиков и схем согласования.
‹ 1
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви