Тег: brushless - сторінка 2
‹ 1
🇺🇦 FOC Board STM32F103RB 🧩
(Оновлено 06.04.2021)
Плата керування безколекторними PMSM моторами на базі модуля мікроконтроллера STM32F103RBT6.
Це бюджетний варіант плати для вивчення MCSDK, який Ви можете зібрати власноруч з доступних у вільному продажу компонентів. Ви можете завантажити схему і файли для виготовлення плати нижче.
Інформація по цьому проекту постійно буде оновлюватися, коригуватися і доповнюватися на цій сторінці.
Схема
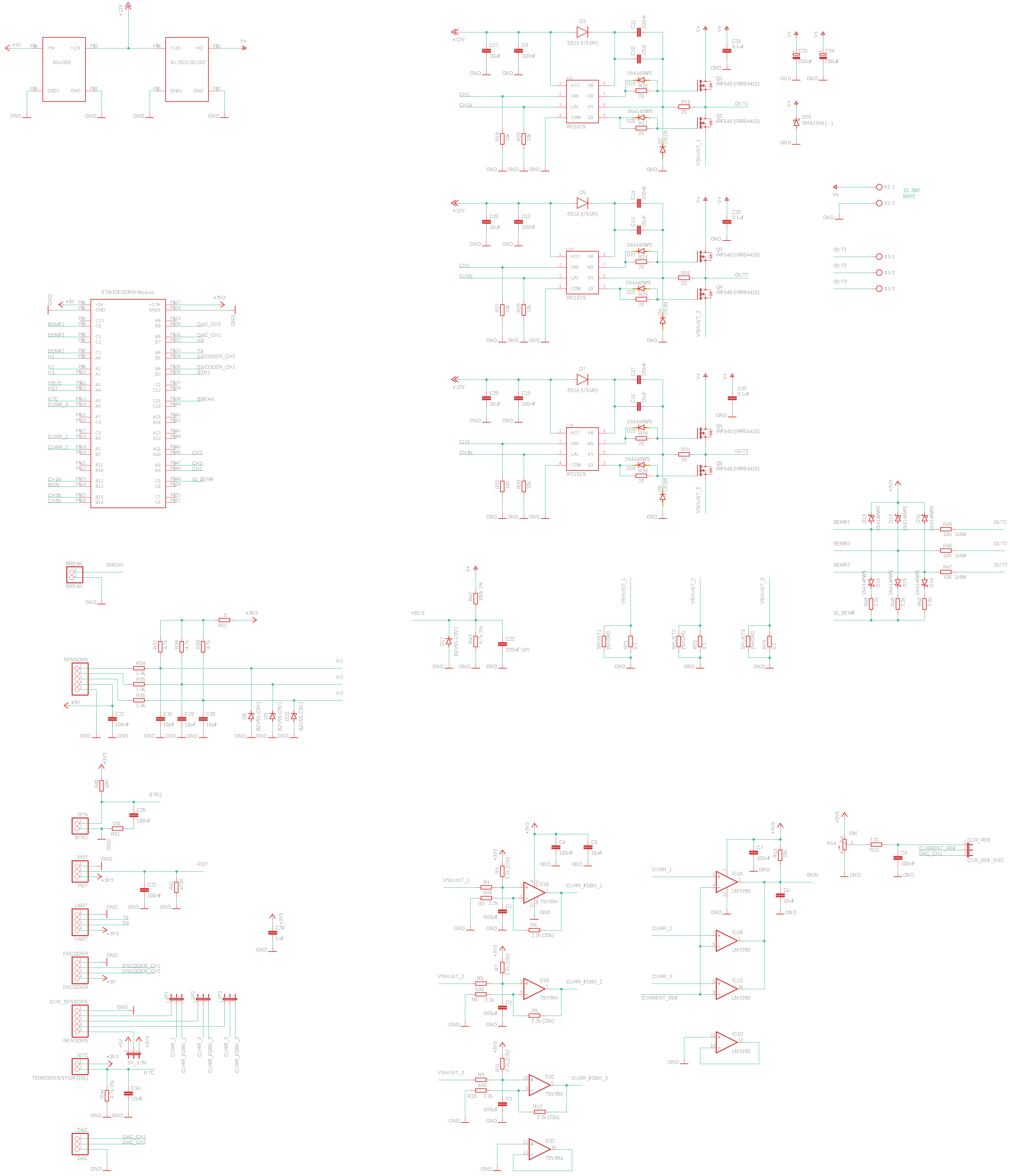
Призначення
Плата призначена для вивчення MCSDK. Може керувати моторами потужністью до 60 Ватт з напругою живлення до 36 В. Або моторами до 300 Ватт з напругою живлення 48 В.Вигляд плати
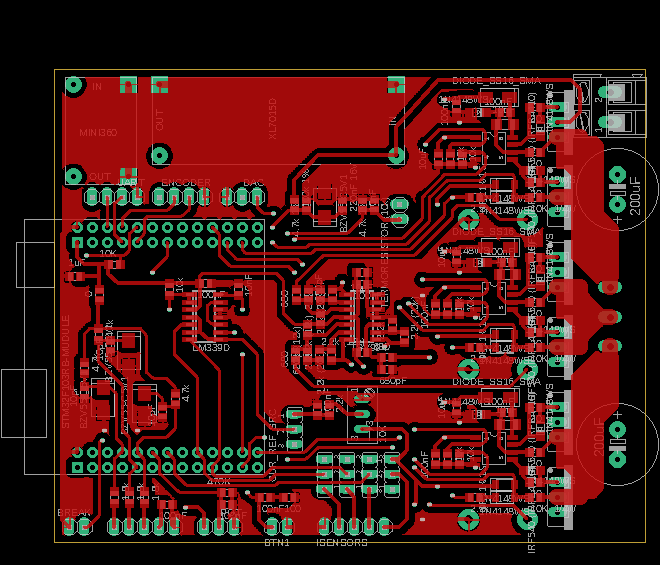
Вигляд плати зверху
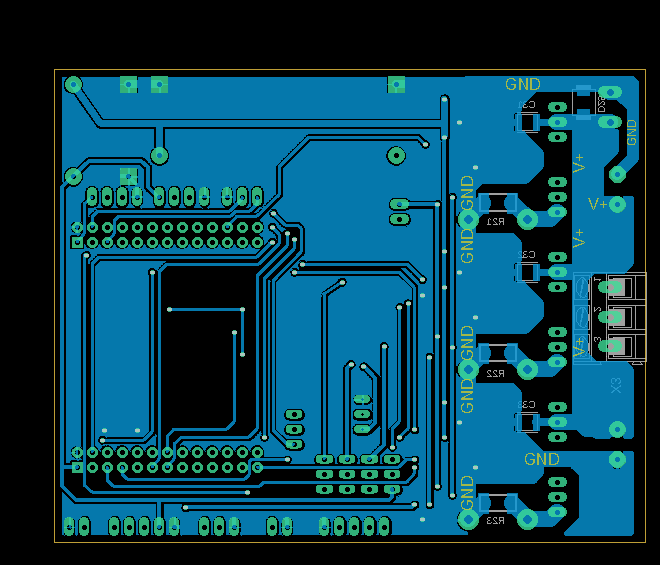
Вигляд плати знизу
STM32 Motor control SDK - керування оборотами мотора за допомогою потенціометра 📑
Векторне управління безколекторним мотором. Як програмно керувати обертами мотора за допомогою потенціометра. X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
STM32 Motor control SDK - програмне керування обертами мотора

Векторне управління безколекторним мотором. Як програмно керувати обертами мотора за допомогою X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
STM32 Motor control SDK - як створити перший проект

Векторне управління безколекторним мотором. Створення проекту і запуск бесколлекторного мотора за допомогою X-CUBE-MCSDK, STM32 Motor Control Software Development Kit (MCSDK) для мікроконтролерів STM32.
Вимірювання моменту мотора

Відео про Метод вимірювання моменту мотора. Пристрій для вимірювання моменту мотора і побудови графіків потужності, оборотів, КПД. Використання тензодатчика для побудови електронного пристрою для вимірювання моменту.
Розрахунок потужності BLDC двигуна

Відео про те, як оцінити потужність саморобного BLDC двигуна.
Розрахунок потужності BLDC двигуна (приблизний):
https://blog.avislab.com/uploads/motor/
BLDC двигун своїми руками
Відео про те, як я від "нічого робити" ізваяв BLDC двигун. Цей безколекторний двигун був зроблений зі статора автомобільного генератора.
Двигун не має ніякої технічної цінності і робився для розваги.
Векторне управління для велосипедного мотор колеса
(HUB motor & FOC)
Тестую векторне управління для велосипедного мотор колеса. У чому різниця між BLDC, PMSM (синус) і FOC (векторне управління). Ділюся враженнями від їзди…
Датчики струму! 10 штук! Куди стільки?
Датчики струму на ефекті Холла ACS712, шунти INA169, мікросхема - датчик струму IR25750
Векторне управління. Фазні і координатні перетворення
Навіщо потрібні перетворення Кларк, пряме і зворотне перетворення Парка.
Підключення мотор колеса до STM32
Керування велосипедним мотор колесом з трьома датчиками Холла у режимі PMSM. Оновлений приклад для STM32.
Це доопрацьований приклад для керування безколекторними моторами з трьома датчиками Холла. Раніше я робив статтю з прикладом для PMSM з трьома датчиками Холла. Але цей приклад відрізняється від попереднього наявністю режиму навчання мікроконтролера. Фактично контролер сам визначає як встановлені датчики Холла. Оновлений приклад також не використовує блочну комутацію під час старту мотора.
Для підключення мотор колеса до моєї плати довелось використовувати схему фільтра яка ліквідує шуми датчиків Холла. Такі "шуми" датчиків Холла виникають у тих моторів у яких датчики встановлені безпосередньо на статорі.
Скачати приклад керування PMSM для STM32
Схема фільтра для датчиків Холла велосипедного мотор колеса:


Детальніше у відео:

PMSM з одним датчиком Холла. Приклад для STM32
Приклад керування безколекторним двигуном з одним датчиком Холла у режимі PMSM.
Раніше я робив статтю з прикладом для PMSM з трьома датчиками Холла. Збуджувати обмотки статора синусоїдальним струмом можна і коли у двигуна лише один датчик Холла. Такі двигуни не використовують у електротранспорті. Двигун з одним датчиком складно запустити під значним навантаженням. Тому безколекторні двигуни з одним датчиком Холла використовують у пристроях де під час старту немає навантаження на валу двигуна. Наприклад, у вентиляторних системах, помпах, тощо. Цей приклад зроблений для мікроконтролера STM32 і моєї тестової плати для роботи з безколекторними моторами.
Скачати приклад керування PMSM з одним датчиком Холла для STM32
Детальніше у відео:

‹ 1
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви