IAR Workbench - IDE для STM32
IAR - IAR Embedded Workbench for ARM 7.80
Встановлення та налаштування. Створення першого проекту. Офіційний сайт: https://www.iar.com/ Комерційне IDE для мікроконтролерів STM32. У безкоштовному варіанті має обмеження на 30 днів, або за обсягом програми до 32Кб. Завантажити можна з офіційного сайту.Встановлення і налаштування IAR
Встановлюємо IAR. Тут все просто - скачав, встановив. Після інсталяції IAR попросить реєстрацію. Потрібно зареєструвати IAR для безкоштовного використання. При реєстрації вказуємо варіант обмеження для безкоштовної версії на 30 днів, або за обсягом програми до 32Кб. Після реєстрації на електронну пошту прийде реєстраційний ключ. Вводимо ключ реєстрації.Встановлення бібліотек SPL
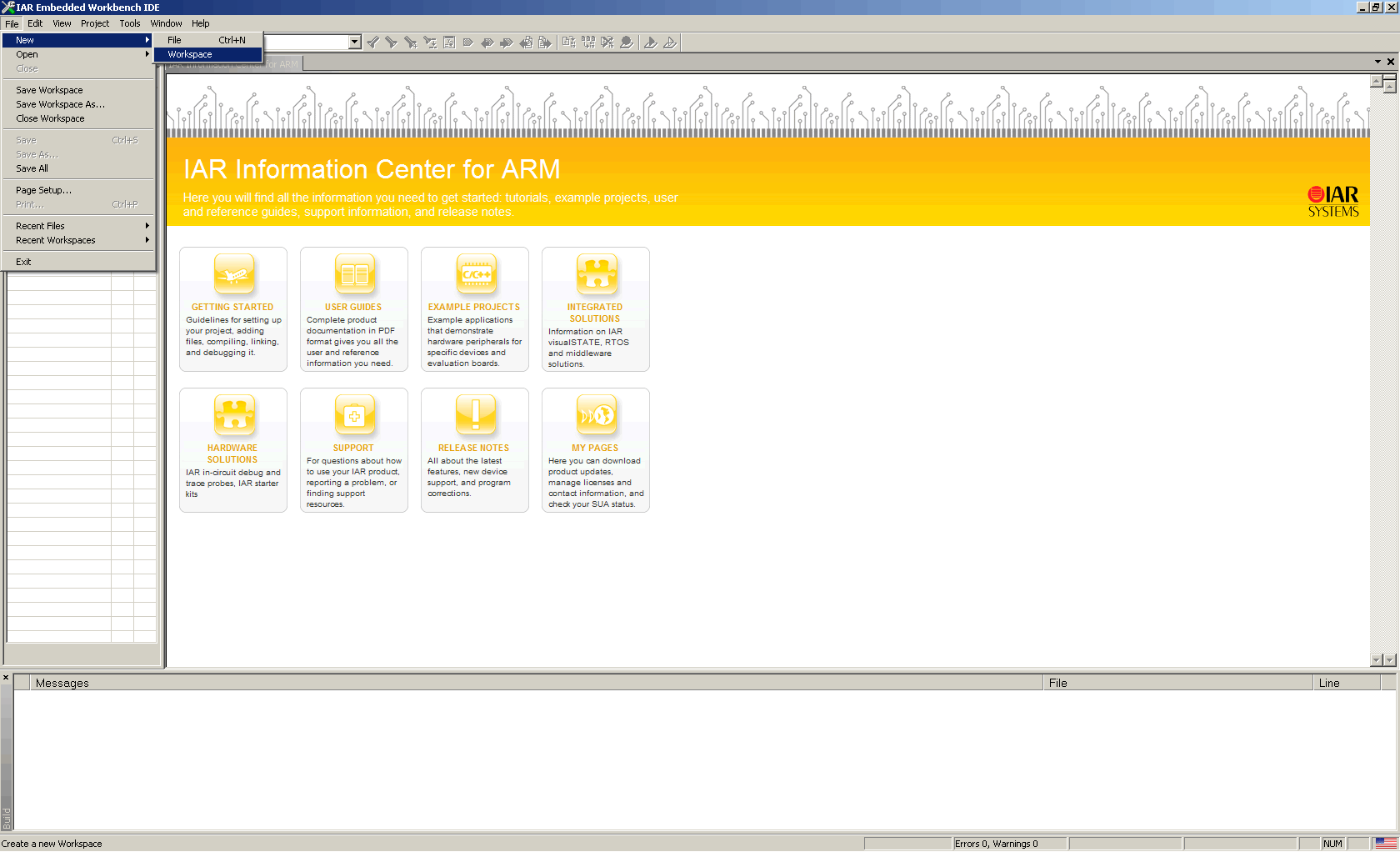
IAR для STM32 встановлюється без бібліотек SPL. Тому потрібно завантажити бібліотеки з сайту st.com. Для STM32F103 посилання: http://www.st.com/content/st_com/en/products/embedded-software/mcus-embedded-software/stm32-embedded-software/stm32-standard -peripheral-libraries / stsw-stm32054.html Створимо папку, у якій будуть зберігатися наші проекти, наприклад C:\STM32_Projects. У цій директорії створюємо папку Libraries і в неї розпаковуємо вміст архіву en.stsw-stm32054.zip (скачана бібліотека SPL). Точніше не весь архів, а вміст папки Libraries з архіву, решта нас мало цікавить. Створюємо папку, в якій буде перший проект нашої програми: C:\STM32_Projects\Example_First_Programm Створюємо Workspace (меню File->New->Workspace)
Створюємо Workspace (меню File->New->Workspace)
 Зберігаємо Workspace у папку C:\STM32_Projects (меню File->Save Workspace As...)
Зберігаємо Workspace у папку C:\STM32_Projects (меню File->Save Workspace As...)

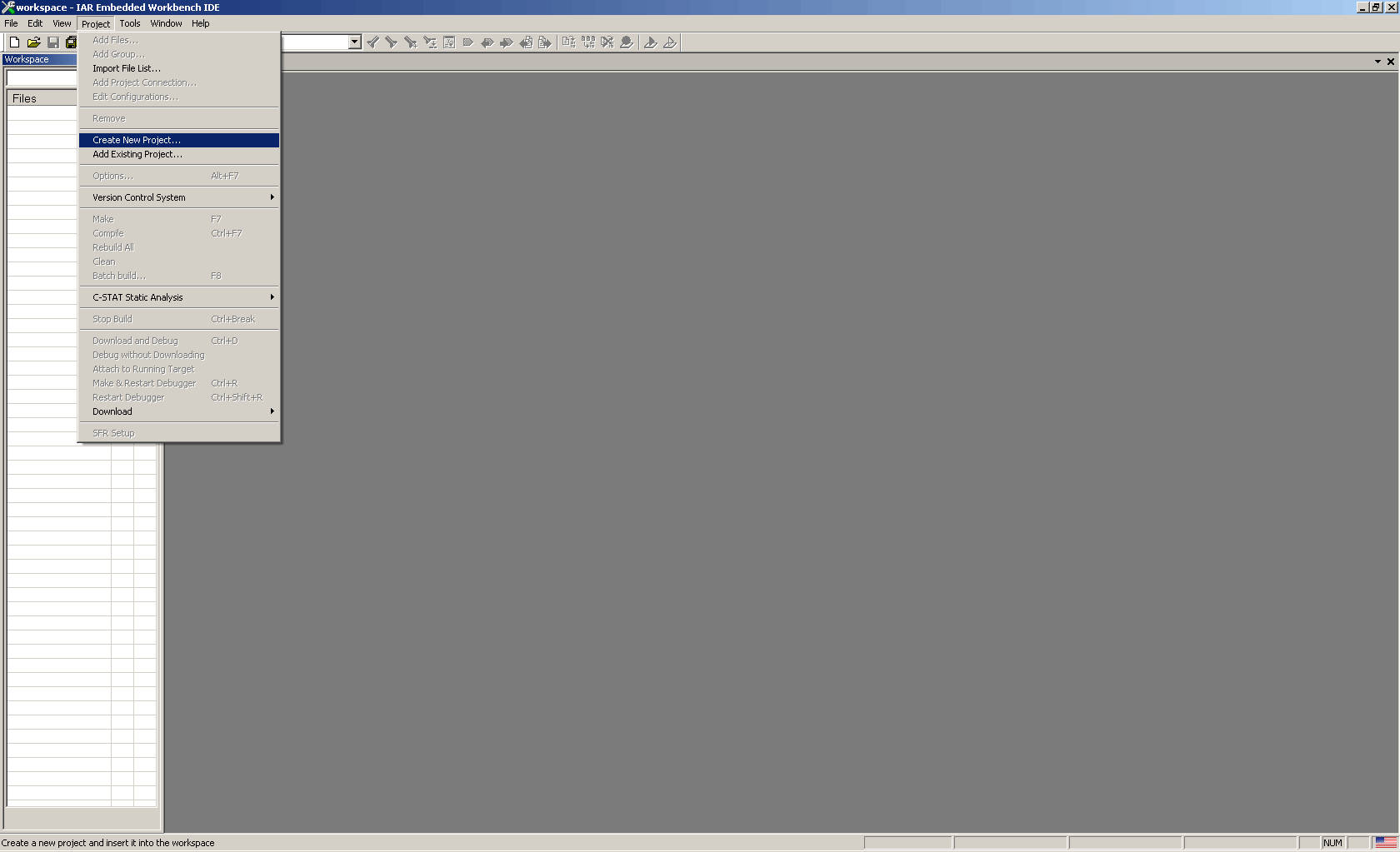
 Створюємо проект (меню Project->Create New Project...)
Створюємо проект (меню Project->Create New Project...)
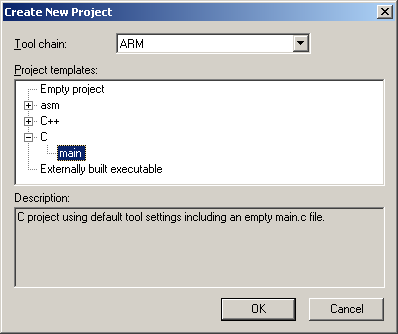
 Обираємо Tool chain: ARM
Обираємо Tool chain: ARM
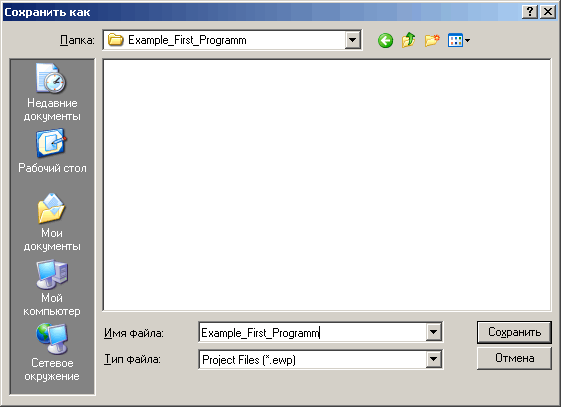
 Зберігаємо проект у папку C:\STM32_Projects\Example_First_Programm.
Зберігаємо проект у папку C:\STM32_Projects\Example_First_Programm.
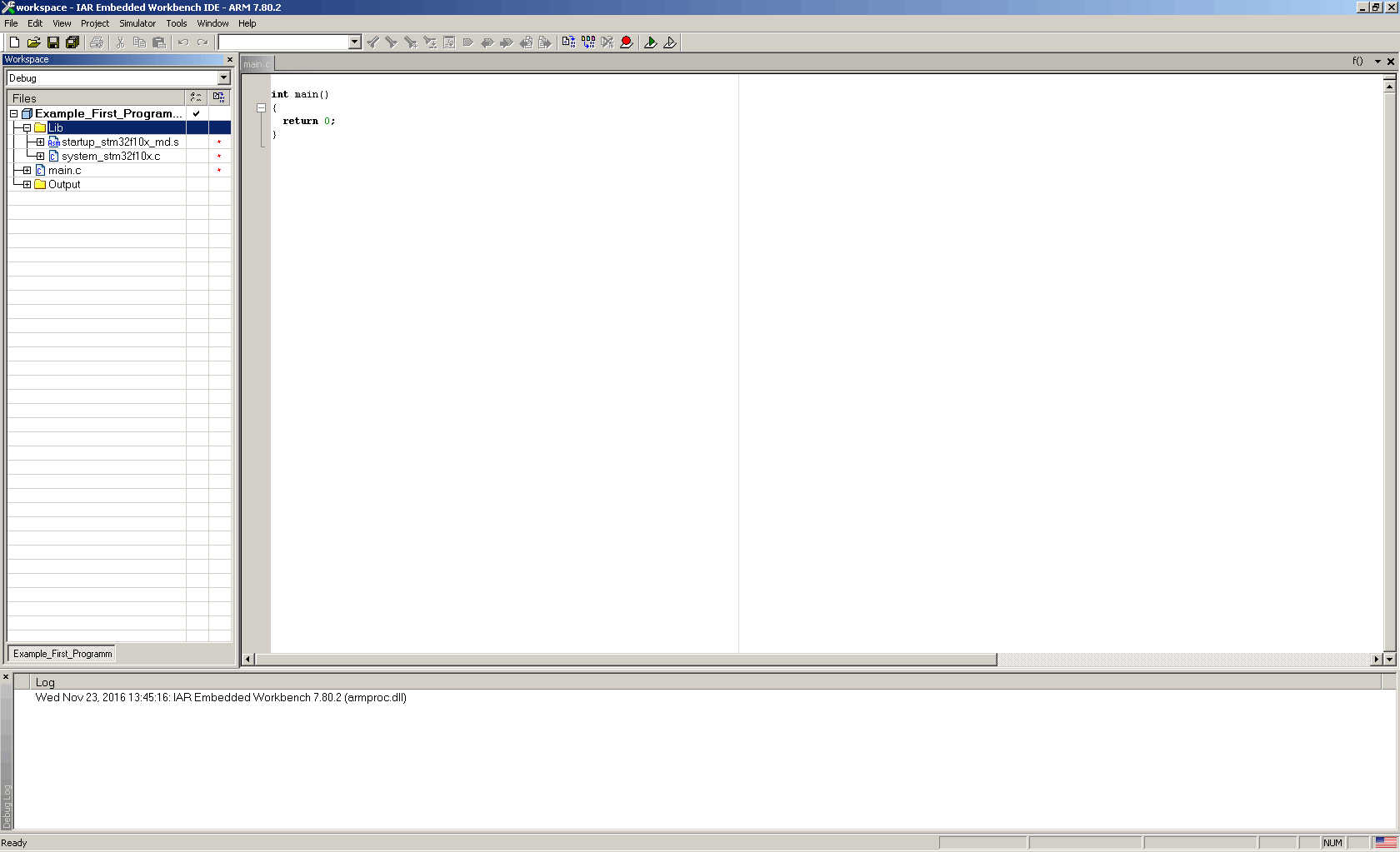
 Отримуємо наступну картину:
Отримуємо наступну картину:
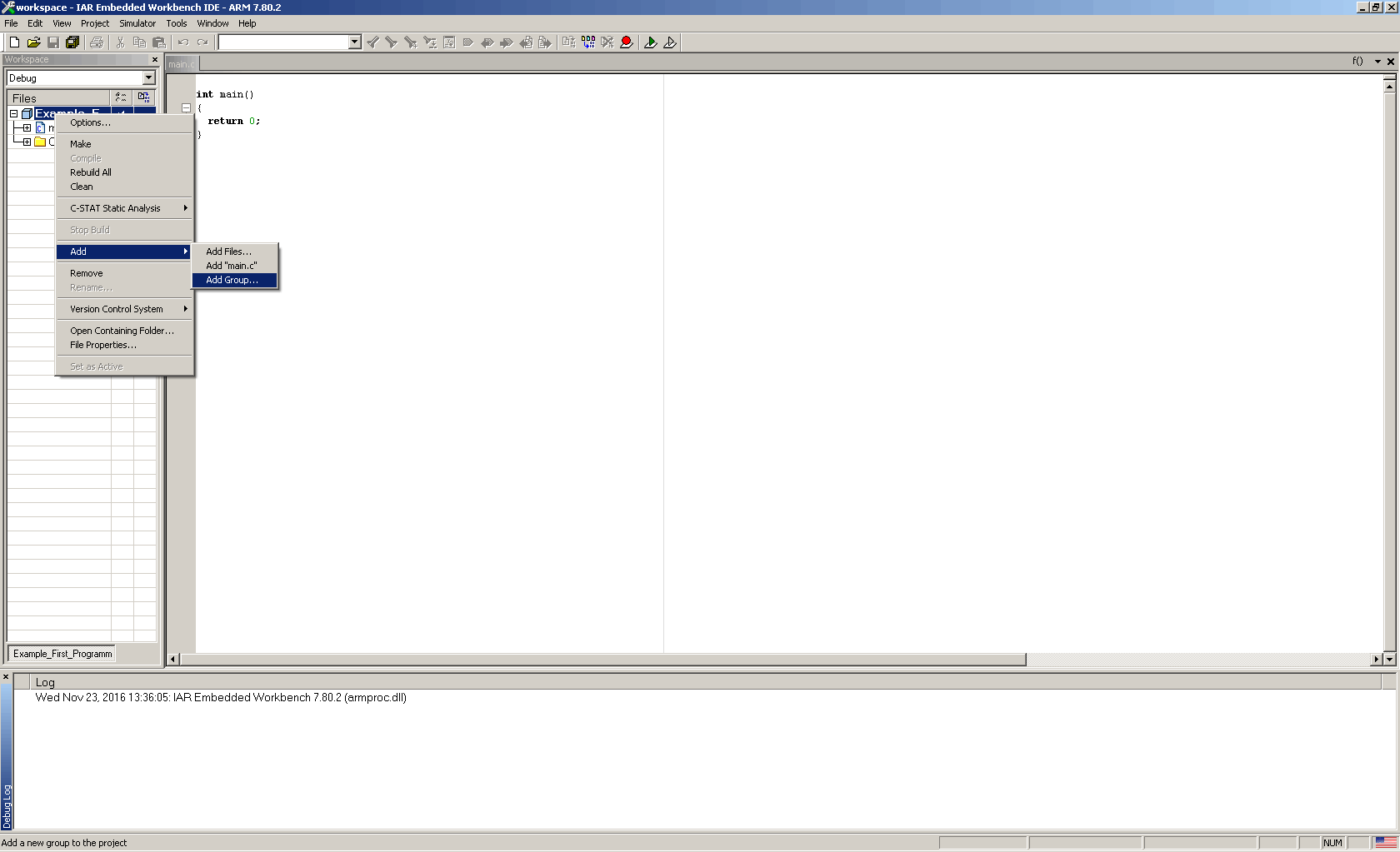
 Додаємо групу для бібліотеки з ім`ям Lib (ім`я особливої ролі не відіграє)
Додаємо групу для бібліотеки з ім`ям Lib (ім`я особливої ролі не відіграє)
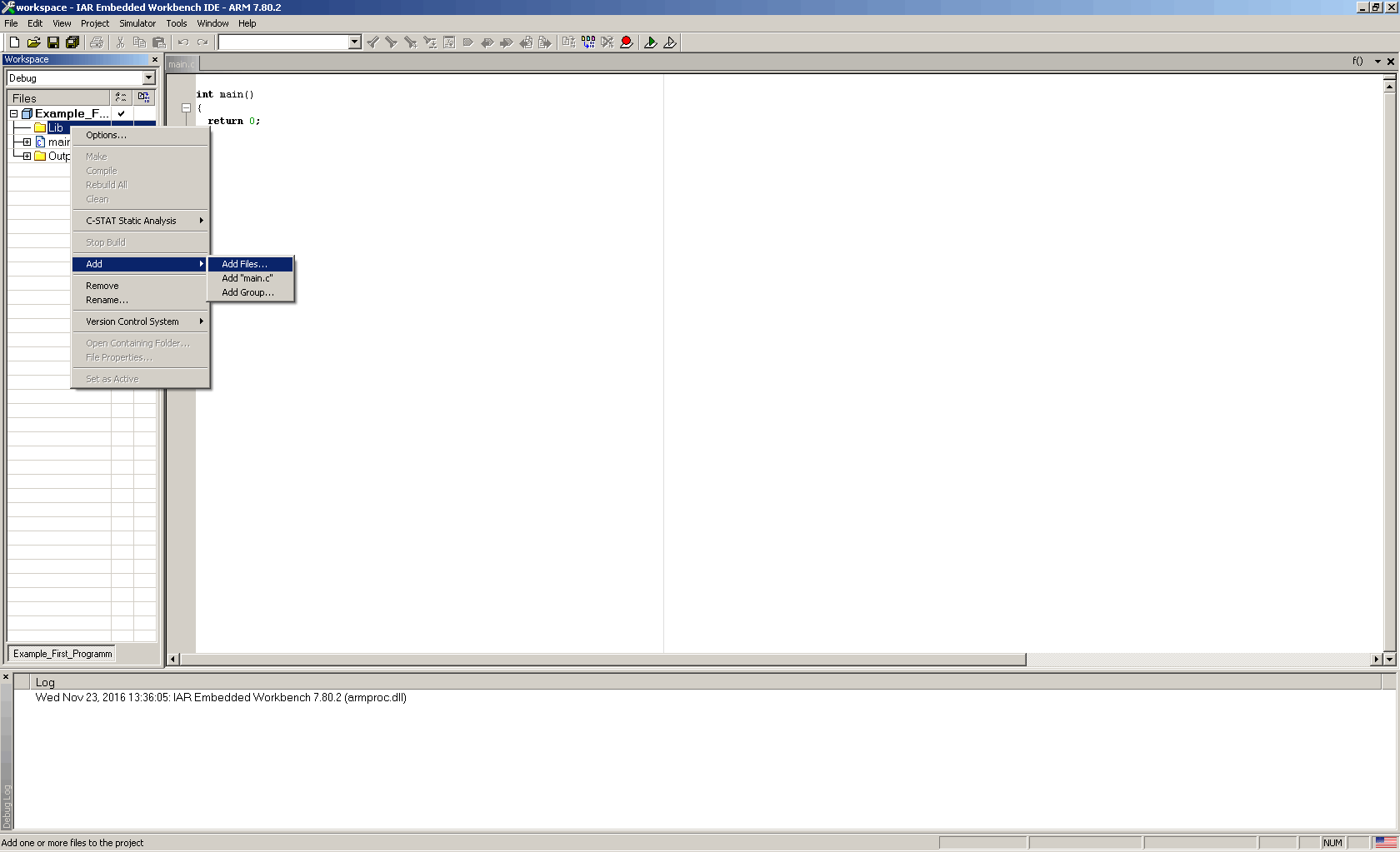
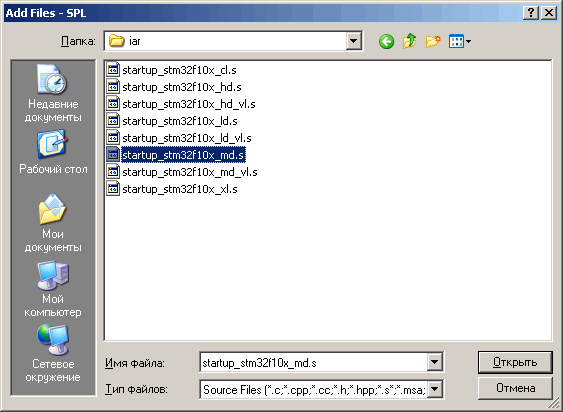
 До групи Lib додаємо файли з бібліотеки CMSIS:
C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar\startup_stm32f10x_md.s
До групи Lib додаємо файли з бібліотеки CMSIS:
C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar\startup_stm32f10x_md.sC:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\system_stm32f10x.c
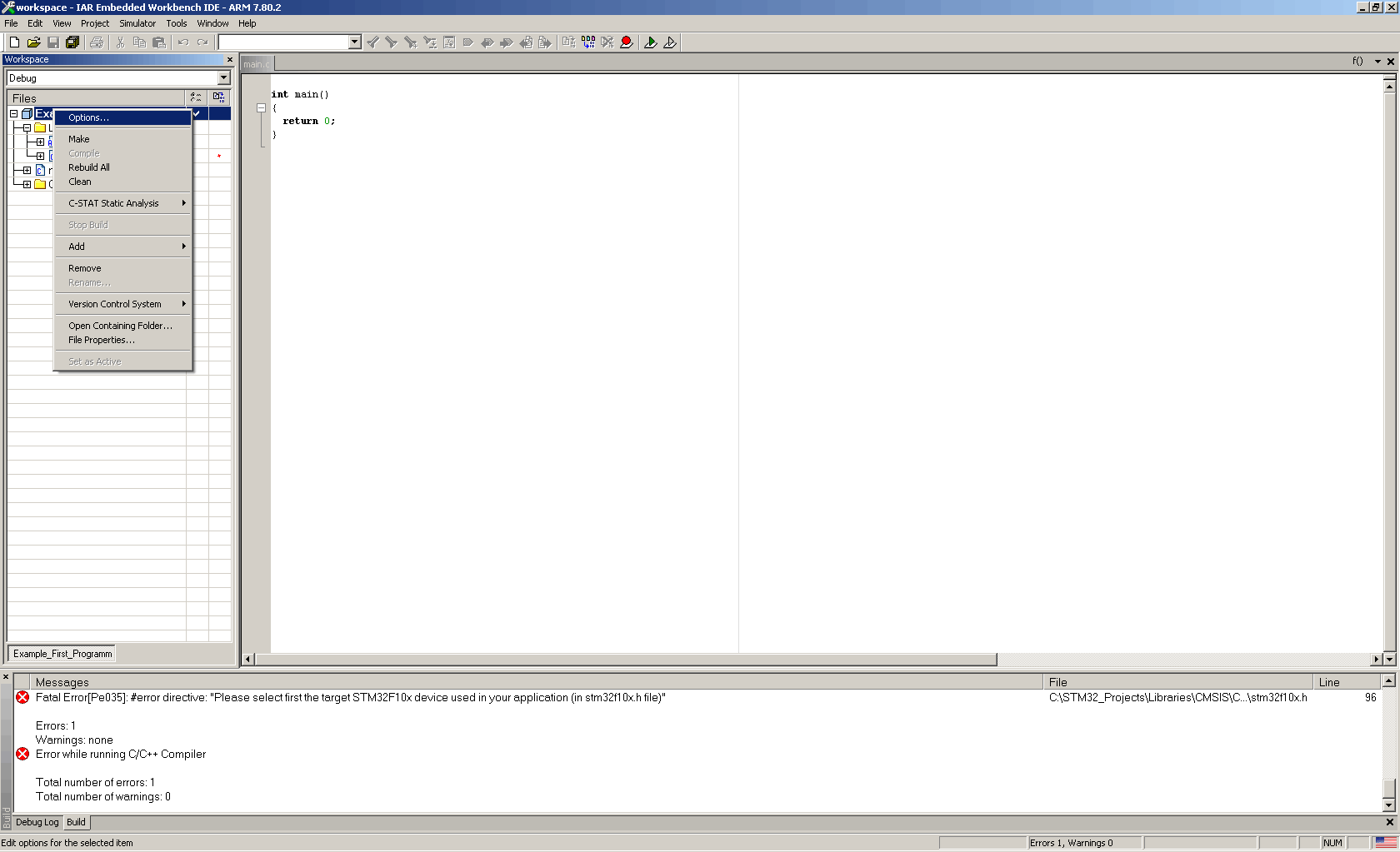
 Відкриваємо налаштування проекту:
Відкриваємо налаштування проекту:
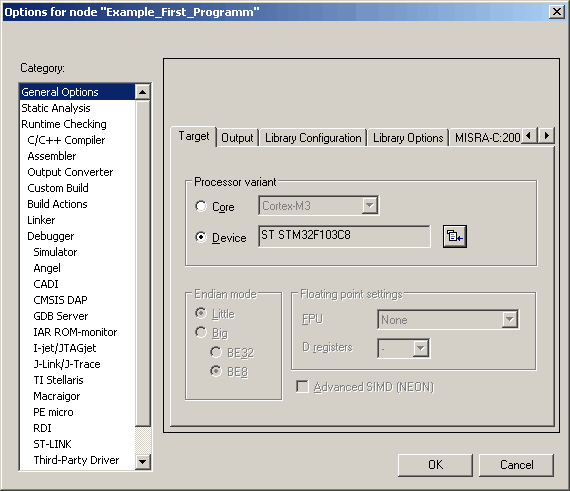
 В налаштуваннях на вкладці Target вказуємо Device
В налаштуваннях на вкладці Target вказуємо Device
 На вкладці Library Configuration вказуємо Use CMSIS і DSP library.
На вкладці Library Configuration вказуємо Use CMSIS і DSP library.
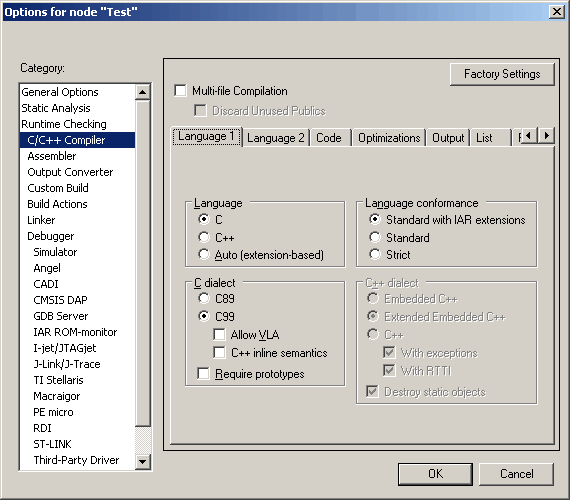
 Переходимо у категорію C/C++ Compiler
Переходимо у категорію C/C++ Compiler
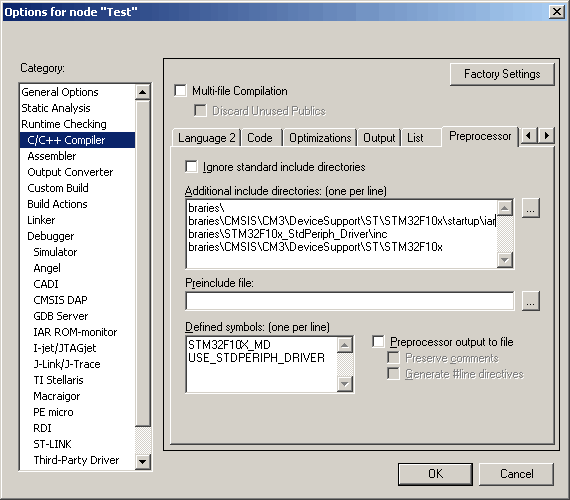
 На вкладці Preprocessor в поле Additional include directories додаємо наступні шляхи:
C:\STM32_Projects
На вкладці Preprocessor в поле Additional include directories додаємо наступні шляхи:
C:\STM32_ProjectsC:\STM32_Projects\Libraries
C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar
C:\STM32_Projects\Libraries\STM32F10x_StdPeriph_Driver\inc
C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x Краще вказувати відносні шляхи: $PROJ_DIR$
$PROJ_DIR$\..\Libraries
$PROJ_DIR$\..\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar
$PROJ_DIR$\..\Libraries\STM32F10x_StdPeriph_Driver\inc
$PROJ_DIR$\..\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x Вказуємо Defined symbols: STM32F10X_MD
USE_STDPERIPH_DRIVER
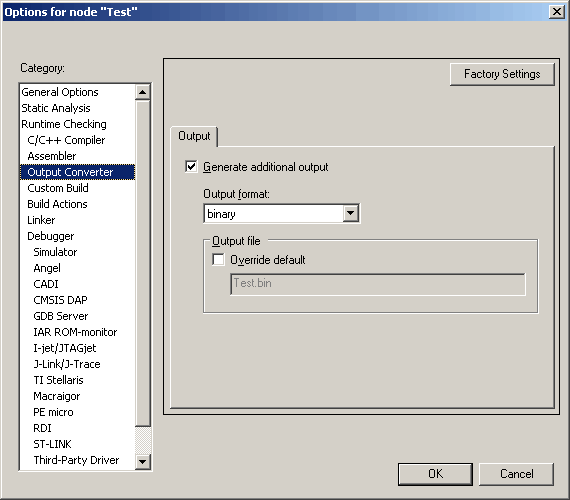
 Переходимо в Категорію Output Converter і обираємо формат вихідного файлу.
Переходимо в Категорію Output Converter і обираємо формат вихідного файлу.
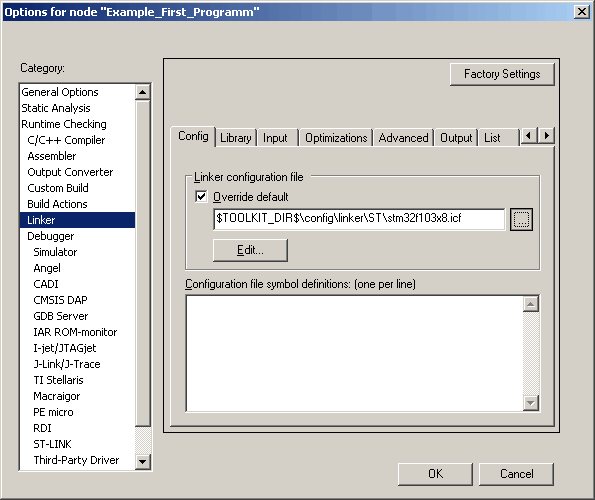
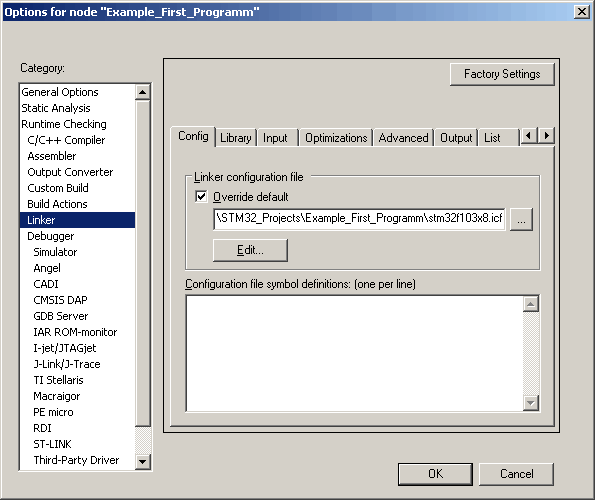
 Переходимо в Категорію Linker
Переходимо в Категорію Linker
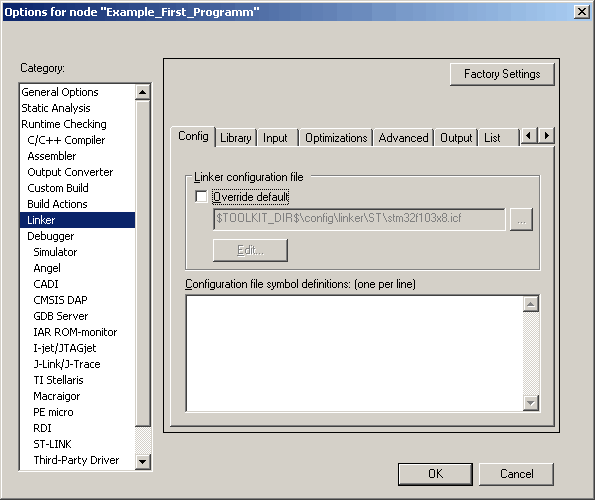 Тут нам потрібно вказати Linker configuration file. Можна залишити як є. Але, якщо у подальшому планується редагувати цей файл, краще його скопіювати в папку проекту. Вмикаємо Override default і натискаємо кнопку з трьома крапками для вибору файлу.
Тут нам потрібно вказати Linker configuration file. Можна залишити як є. Але, якщо у подальшому планується редагувати цей файл, краще його скопіювати в папку проекту. Вмикаємо Override default і натискаємо кнопку з трьома крапками для вибору файлу.
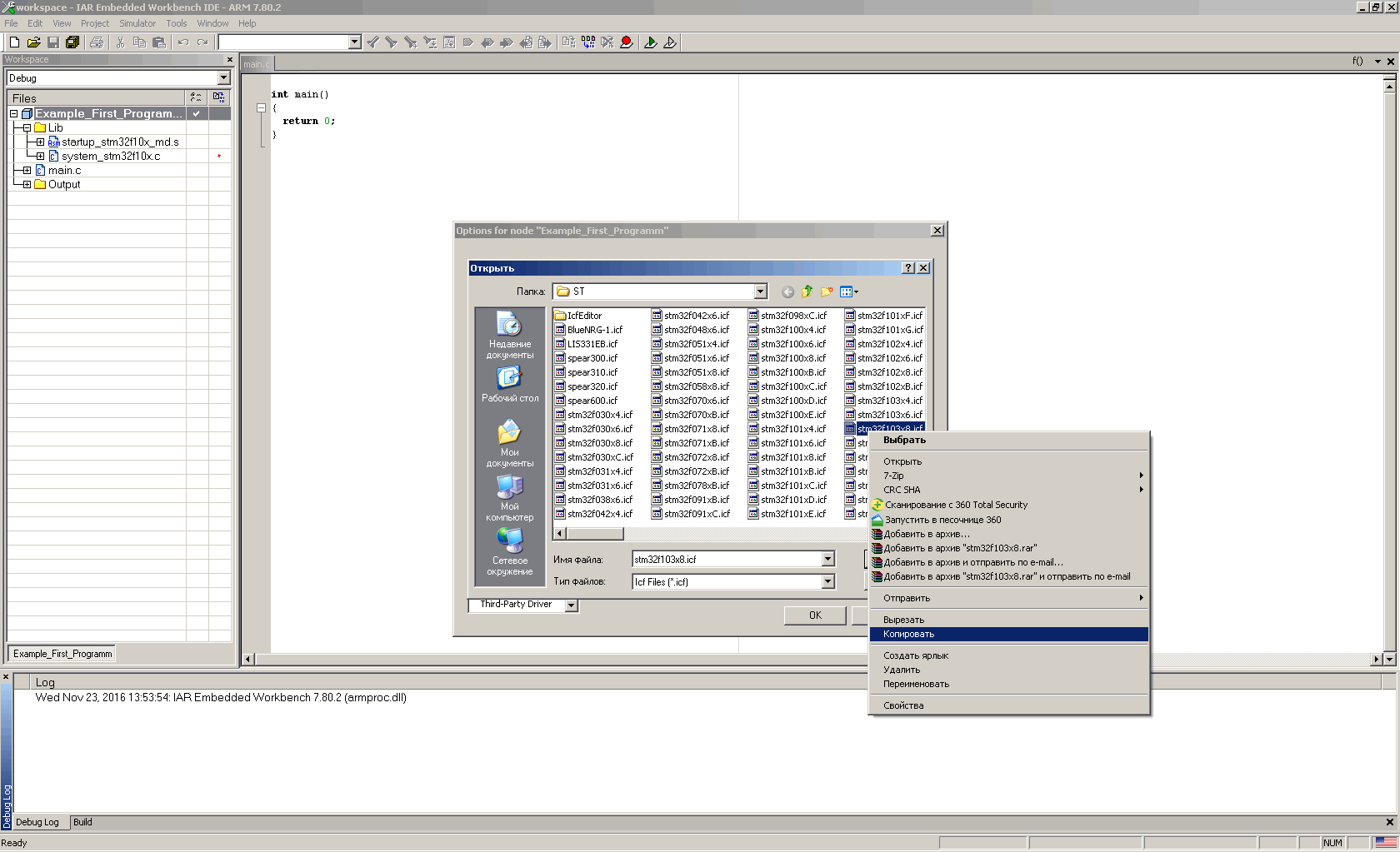
 Діалогове вікно відкриється у директорії з файлами icf. Знаходимо потрібний файл для нашого контролера, правою кнопкою миші викликаємо контекстне меню і виконуємо пункт Копіювати.
Діалогове вікно відкриється у директорії з файлами icf. Знаходимо потрібний файл для нашого контролера, правою кнопкою миші викликаємо контекстне меню і виконуємо пункт Копіювати.
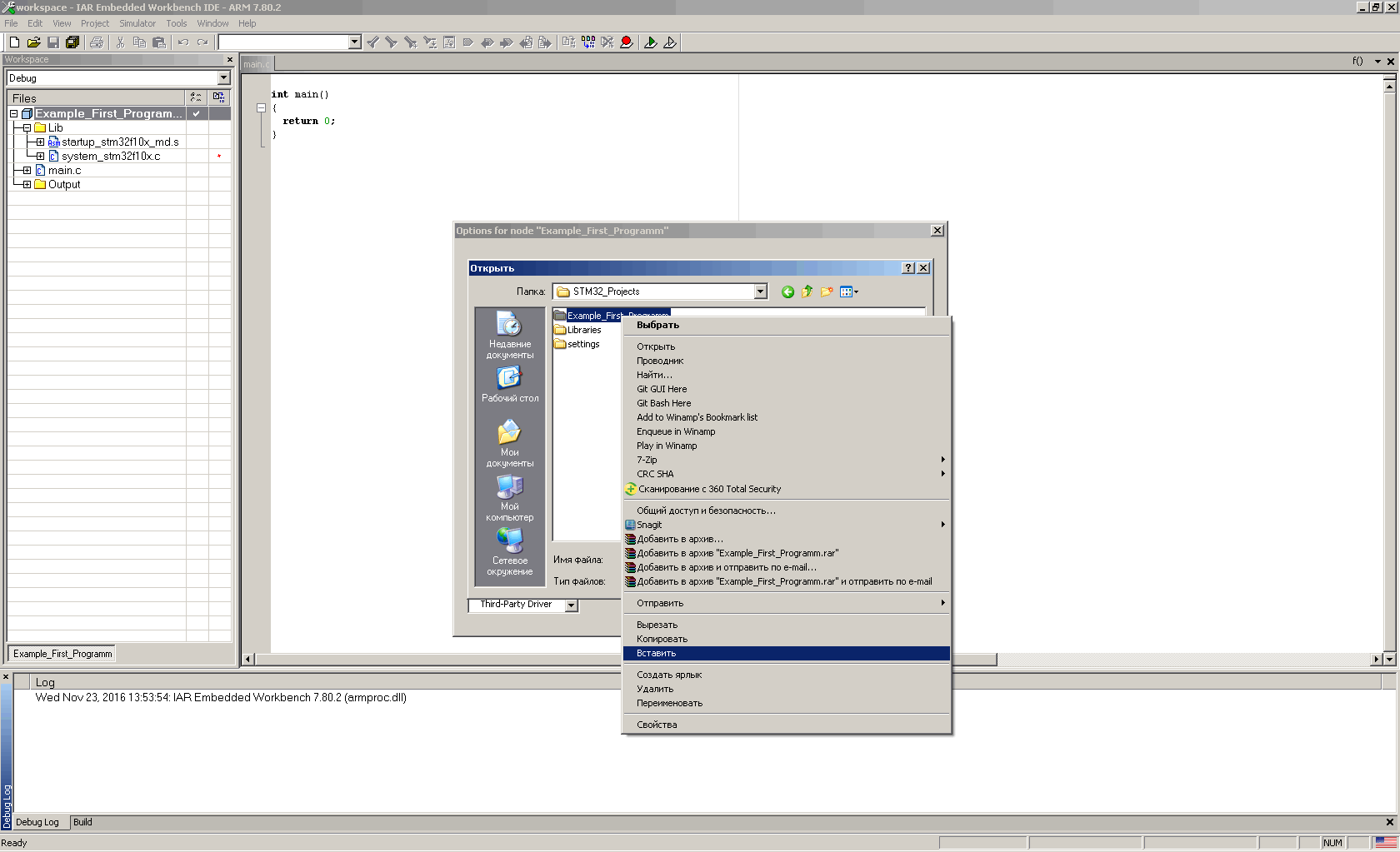
 Далі переходимо у папку STM32_Project і вставляємо файл в папку нашого проекту.
Далі переходимо у папку STM32_Project і вставляємо файл в папку нашого проекту.

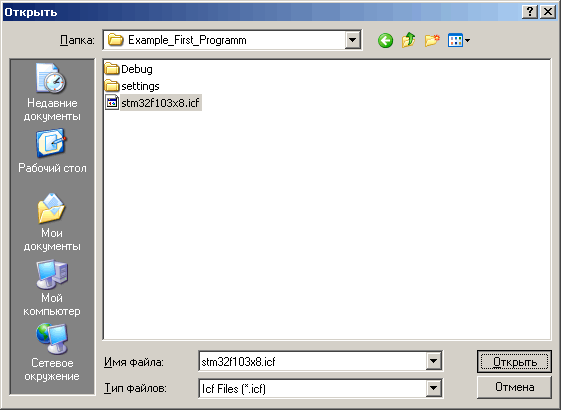
 Після чого заходимо в папку проекту і обираємо скопійований файл.
Після чого заходимо в папку проекту і обираємо скопійований файл.
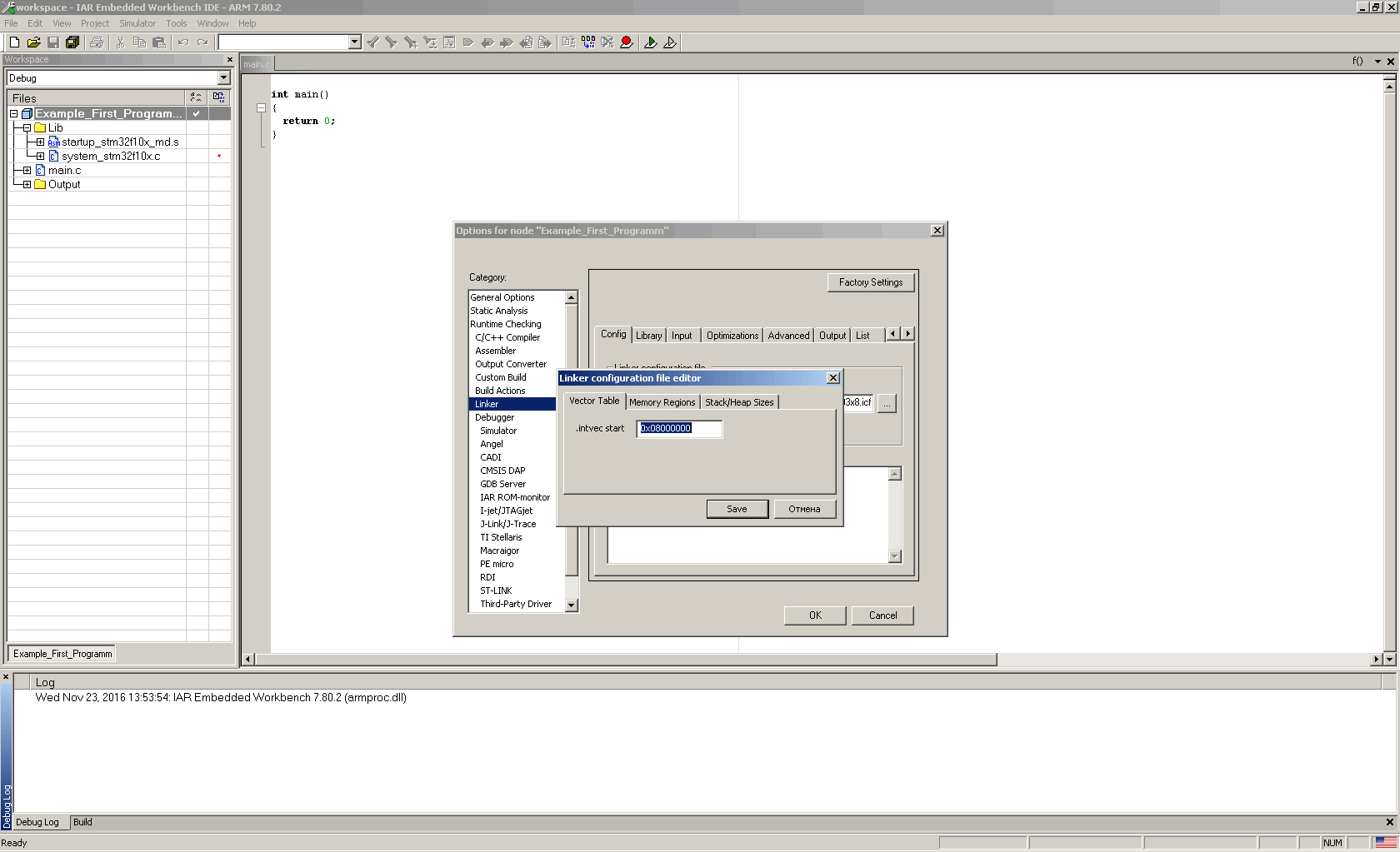
 Тепер натиснувши кнопку Edit... можна редагувати icf файл свого проекту.
Тепер натиснувши кнопку Edit... можна редагувати icf файл свого проекту.
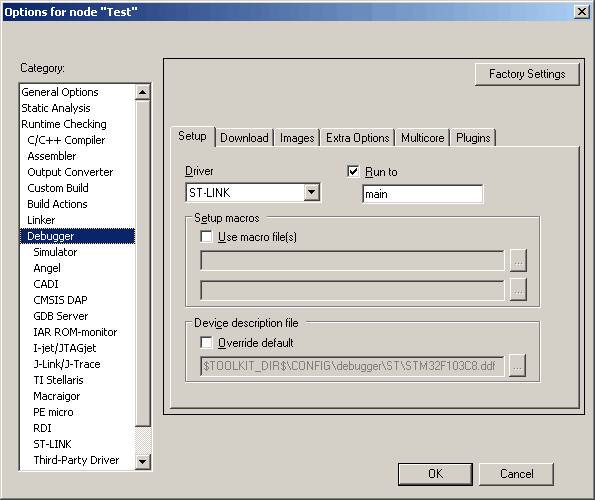
 Переходимо у категорію Debugger і обераємо Driver. У моєму випадку це ST-Link.
Переходимо у категорію Debugger і обераємо Driver. У моєму випадку це ST-Link.
 У директорії проекту або в директорії C:\STM32_Projects\Libraries\ створюємо файл stm32f10x_conf.h
Наприклад, такого змісту:
У директорії проекту або в директорії C:\STM32_Projects\Libraries\ створюємо файл stm32f10x_conf.h
Наприклад, такого змісту:
/**
******************************************************************************
* @file stm32f10x_conf.h
* @author MCD Application Team
* @version V3.4.0
* @date 10/15/2010
* @brief Library configuration file.
******************************************************************************
* @copy
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2010 STMicroelectronics</center></h2>
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __STM32F10x_CONF_H
#define __STM32F10x_CONF_H
/* Includes ------------------------------------------------------------------*/
/* Uncomment the line below to enable peripheral header file inclusion */
/* #include "stm32f10x_adc.h" */
/* #include "stm32f10x_bkp.h" */
/* #include "stm32f10x_can.h" */
/* #include "stm32f10x_cec.h" */
/* #include "stm32f10x_crc.h" */
/* #include "stm32f10x_dac.h" */
/* #include "stm32f10x_dbgmcu.h" */
/* #include "stm32f10x_dma.h" */
/* #include "stm32f10x_exti.h" */
/* #include "stm32f10x_flash.h" */
/* #include "stm32f10x_fsmc.h" */
/* #include "stm32f10x_gpio.h" */
/* #include "stm32f10x_i2c.h" */
/* #include "stm32f10x_iwdg.h" */
/* #include "stm32f10x_pwr.h" */
/* #include "stm32f10x_rcc.h" */
/* #include "stm32f10x_rtc.h" */
/* #include "stm32f10x_sdio.h" */
/* #include "stm32f10x_spi.h" */
/* #include "stm32f10x_tim.h" */
/* #include "stm32f10x_usart.h" */
/* #include "stm32f10x_wwdg.h" */
/* #include "misc.h" */ /* High level functions for NVIC and SysTick (add-on to CMSIS functions) */
/* Exported types ------------------------------------------------------------*/
/* Exported constants --------------------------------------------------------*/
/* Uncomment the line below to expanse the "assert_param" macro in the
Standard Peripheral Library drivers code */
/* #define USE_FULL_ASSERT 1 */
/* Exported macro ------------------------------------------------------------*/
#ifdef USE_FULL_ASSERT
/**
* @brief The assert_param macro is used for function`s parameters check.
* @param expr: If expr is false, it calls assert_failed function
* which reports the name of the source file and the source
* line number of the call that failed.
* If expr is true, it returns no value.
* @retval None
*/
#define assert_param(expr) ((expr) ? (void)0 : assert_failed((uint8_t *)__FILE__, __LINE__))
/* Exported functions ------------------------------------------------------- */
void assert_failed(uint8_t* file, uint32_t line);
#else
#define assert_param(expr) ((void)0)
#endif /* USE_FULL_ASSERT */
#endif /* __STM32F10x_CONF_H */
/******************* (C) COPYRIGHT 2010 STMicroelectronics *****END OF FILE****/
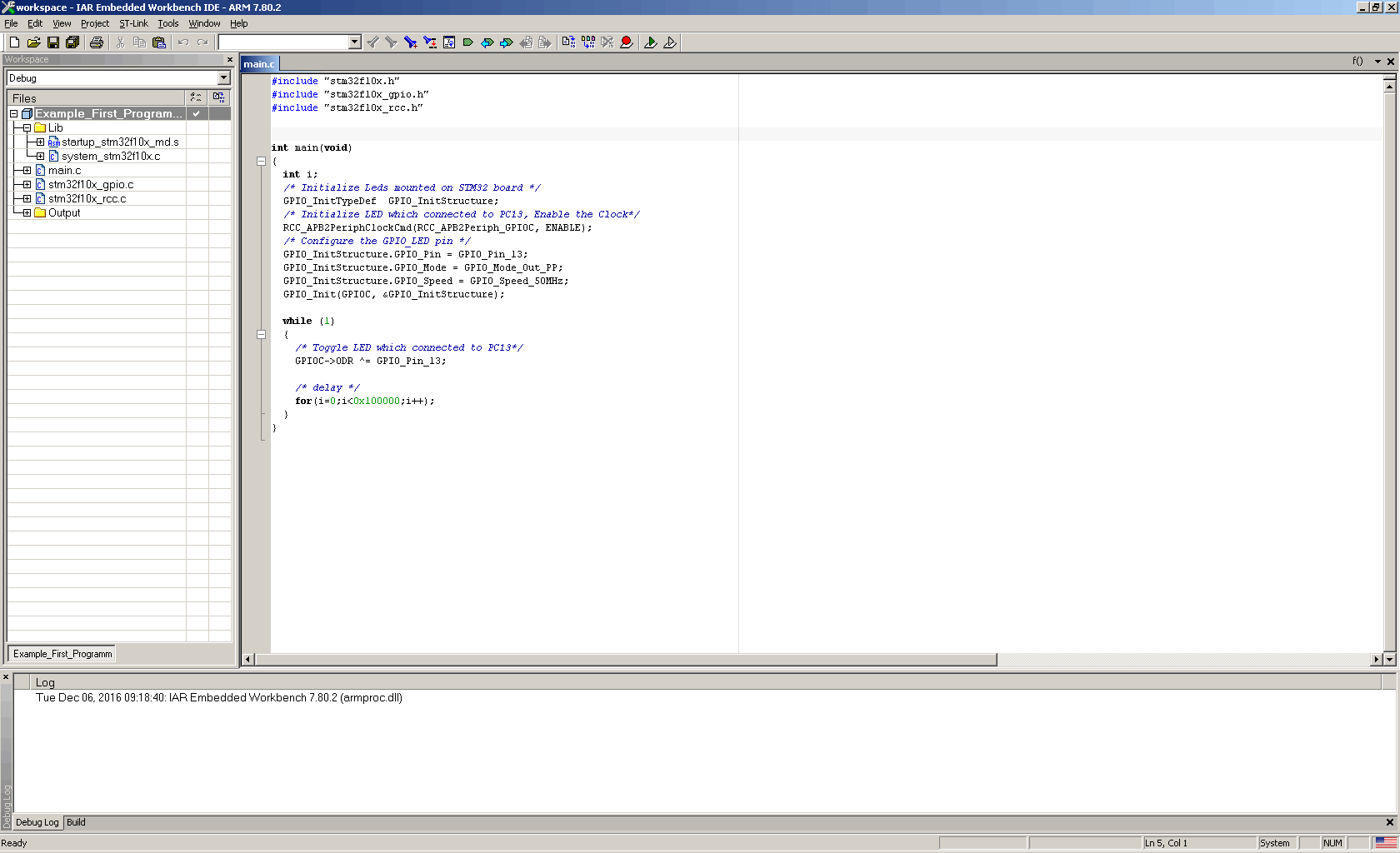
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
int main(void)
{
int i;
/* Initialize Leds mounted on STM32 board */
GPIO_InitTypeDef GPIO_InitStructure;
/* Initialize LED which connected to PC13, Enable the Clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
while (1)
{
/* Toggle LED which connected to PC13*/
GPIOC->ODR ^= GPIO_Pin_13;
/* delay */
for(i=0;i<0x100000;i++);
}
}
 Збираємо проект (меню Project-> Make або Project-> Rebuild All)
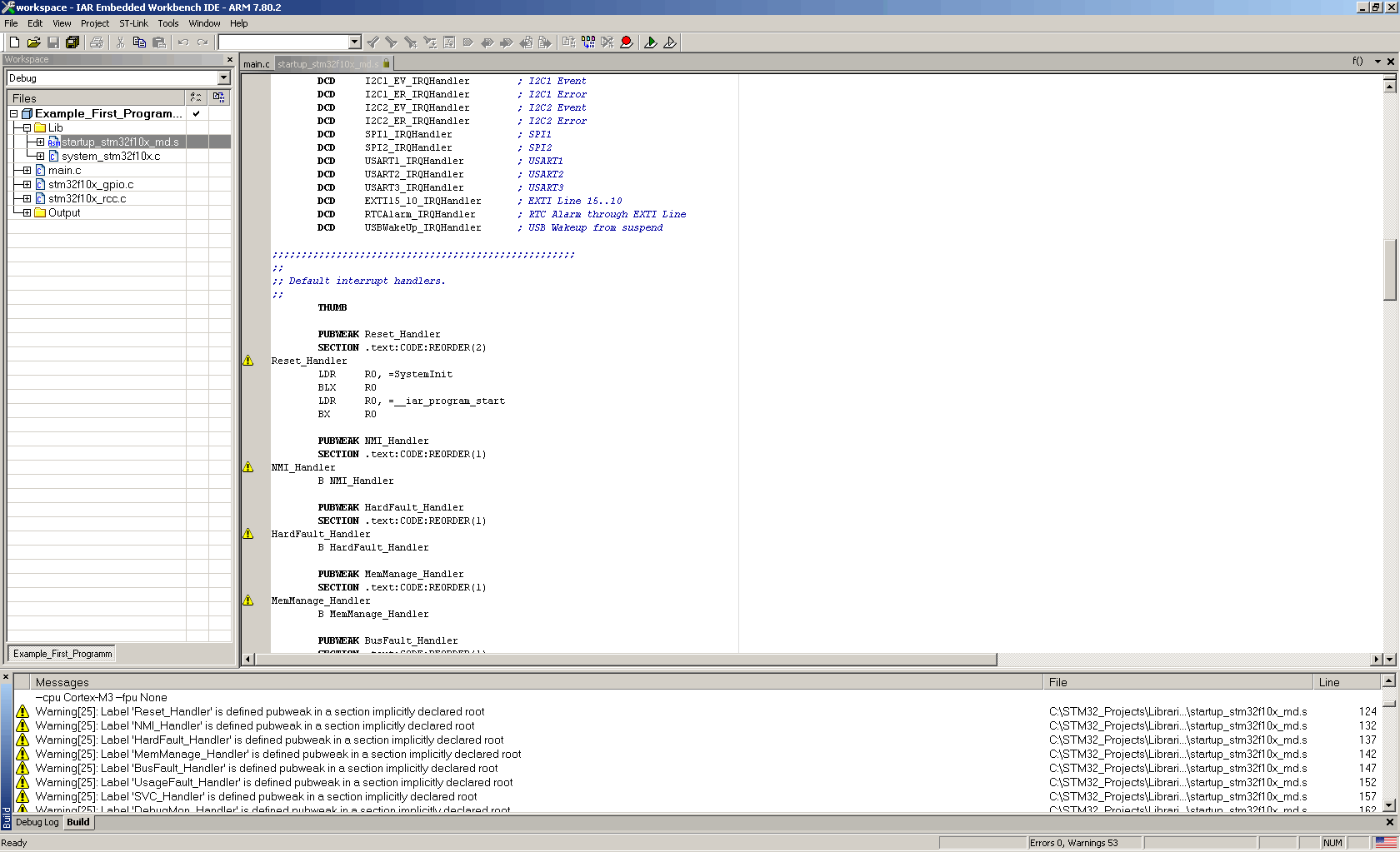
Під час компіляції можуть виникнути такі попередження:
Warning [25]: Label `Reset_Handler` is defined pubweak in a section implicitly declared root C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar\startup_stm32f10x_md.s 124
Збираємо проект (меню Project-> Make або Project-> Rebuild All)
Під час компіляції можуть виникнути такі попередження:
Warning [25]: Label `Reset_Handler` is defined pubweak in a section implicitly declared root C:\STM32_Projects\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar\startup_stm32f10x_md.s 124
 Опис проблеми можна почитати тут:
https://www.iar.com/support/tech-notes/assembler/warning25-label-xxxxx-is-defined-pubweak-in-a-section-implicitly-declared-root/
Рішення наступне: Потрібно відкрити файл startup_stm32f10x_md.s (ми його вже додали в проект) і замінити рядки
SECTION .text:CODE:REORDER
на
SECTION .text:CODE:NOROOT:REORDER
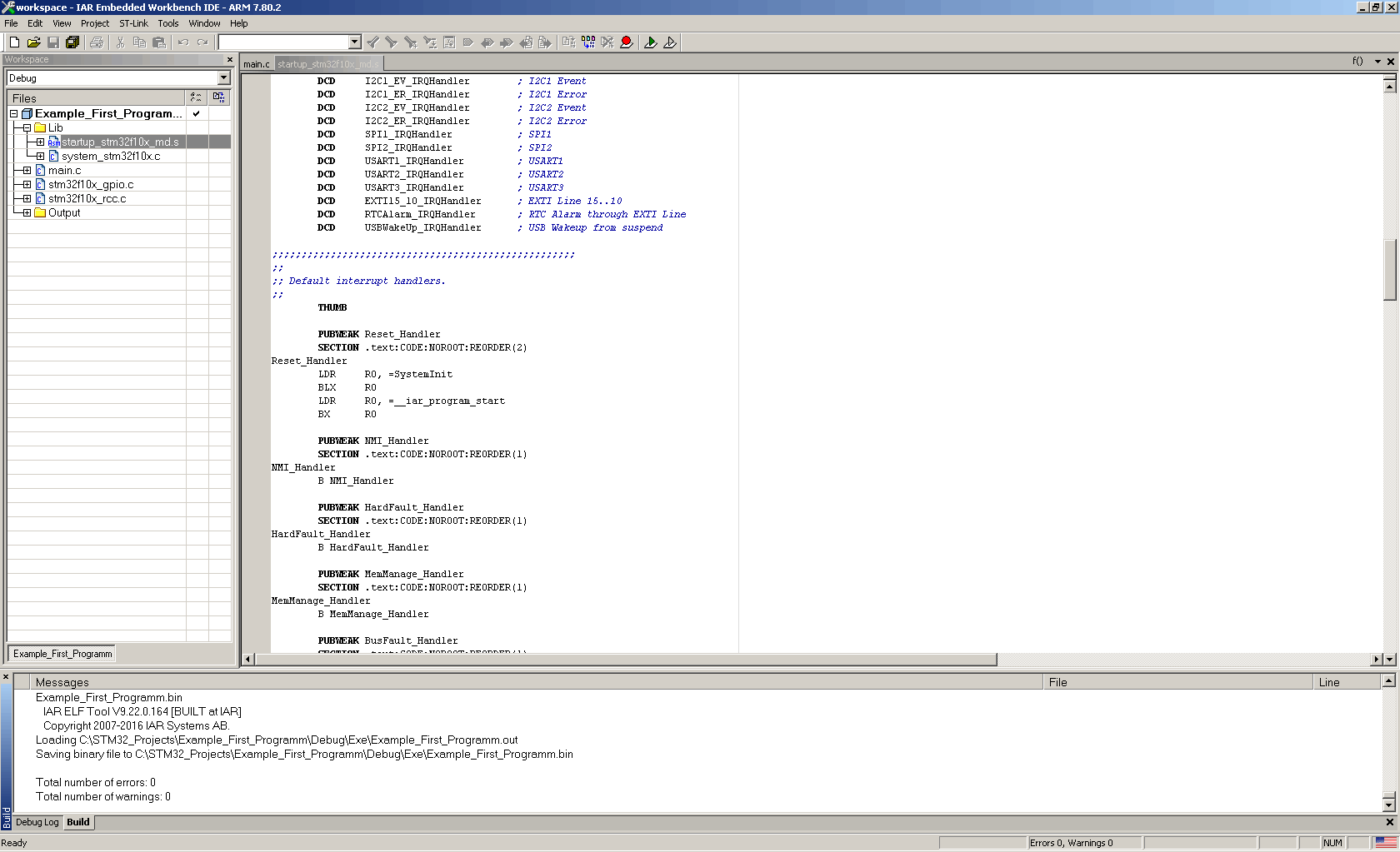
Тобто по суті, додати NOROOT.
Після коригування файлу startup_stm32f10x_md.s такі попередження при компіляції мають зникнути.
Опис проблеми можна почитати тут:
https://www.iar.com/support/tech-notes/assembler/warning25-label-xxxxx-is-defined-pubweak-in-a-section-implicitly-declared-root/
Рішення наступне: Потрібно відкрити файл startup_stm32f10x_md.s (ми його вже додали в проект) і замінити рядки
SECTION .text:CODE:REORDER
на
SECTION .text:CODE:NOROOT:REORDER
Тобто по суті, додати NOROOT.
Після коригування файлу startup_stm32f10x_md.s такі попередження при компіляції мають зникнути.
 Успіхів.
Успіхів.
Дивись також:
- 1. STM32. Програмування STM32F103. Тестова плата. Прошивка через UART та через ST-Link
- 2. STM32. Програмування. IDE для STM32
- 3. STM32. Програмування STM32F103. GPIO
- 4. STM32. Програмування STM32F103. Тактування
- 5. STM32. Програмування STM32F103. USART
- 6. STM32. Програмування STM32F103. NVIC
- 7. STM32. Програмування STM32F103. ADC
- 8. STM32. Програмування STM32F103. DMA
- 9. STM32. Програмування STM32F103. TIMER
- 10. STM32. Програмування STM32F103. TIMER. Захоплення сигналу
- 11. STM32. Програмування STM32F103. TIMER. Encoder
- 12. STM32. Програмування STM32F103. TIMER. PWM
- 13. STM32. Програмування STM32F103. EXTI
- 14. STM32. Програмування STM32F103. RTC
- 15. STM32. Програмування STM32F103. BKP
- 16. STM32. Програмування STM32F103. Flash
- 17. STM32. Програмування STM32F103. Watchdog
- 18. STM32. Програмування STM32F103. Remap
- 19. STM32. Програмування STM32F103. I2C Master
- 20. STM32. Програмування STM32F103. I2C Slave
- 21. STM32. Програмування STM32F103. USB
- 22. STM32. Програмування STM32F103. PWR
- 23. STM32. Програмування STM32F103. Option bytes
- 24. STM32. Програмування STM32F103. Bootloader
- STM32. Скачати приклади
- System Workbench for STM32 Інсталяція на Ubuntu
- Keil uVision5 – IDE для STM32
- IAR Workbench – IDE для STM32
- Керування безколекторним двигуном постійного струму (BLDC) за допомогою STM32
- Керування PMSM за допомогою STM32
Спасибо, то что надо! Скажите, какая среда удобней Keil или IAR? и в чём их различия?
Выбор среды разработки - это как выбирать костюм. То что подошло мне может не подойти Вам. И никто не может запретить Вам иметь несколько костюмов на разные случаи. Эти обе среды платные и в бесплатном варианте имеют одинаковые ограничения. IAR компилирует более плотнее. Я долгое время работал с IAR для STM8 и немного привык к ней. Но Keil более популярный. Я тяготею к бесплатному GCC и использую CooCox.
Дякую за статтю, особливо на рідній. Тільки намагаюсь познайомитись з IAR і як на мене досить тяжкий. Зараз пробую використати ваш приклад для своєї тест плати ZET6-2303 на STM32F103ZET6 але сипле куча попереджень.
Tags
bme280 mpu-6050 encoder examples adc lcd python wifi bluetooth rtc pwm piezo ngnix watchdog books rfid web st-link eeprom bkp usart led nodemcu flash websocket uart 3d-printer options html git meteo gpio soldering flask tim servo rs-232 raspberry-pi programmator stm32 sms dma battery dht11 hih-4000 css ssd1331 pmsm bmp280 avr brushless motor usb barometer max1674 displays esp8266 docker java-script ssd1306 i2c capture nvic bldc atmega exti ethernet timer mpu-9250 smd mpx4115a sensors dc-dc mongodb eb-500 remap solar foc gps
Архіви