22. STM32. Програмування STM32F103. PWR
Зниження енергоспоживання мікроконтролера частіше за все нас цікавить при розробці приладів, які живляться від акумуляторів чи батарей. STM32 дозволяє керувати власним енергоспоживанням. Перш, ніж ми навчимося застосовувати режими зниженого енергоспоживання, розглянемо, як організоване живлення мікроконтролера та загальні методи зниження енергоспоживання.
Схема живлення. Домени живлення
Мікроконтролер STM32 має декілька блоків (доменів), на які живлення може подаватися окремо. Головне живлення подається на Vss, Vdd і має бути від 2.0 до 3.6В. Живлення АЦП зазвичай подається окремо. Це робиться для підвищення точності роботи АЦП. Також мікроконтролер має Backup Domain, який містить Backup registers (BKP) та Годинник реального часу (RTC). Живлення для Backup Domain подається окремо. Звісно, якщо ми не збираємось використовувати якісь блоки, ми їх просто не живимо. Та зазвичай нас цікавить зниження споживання основного живлення.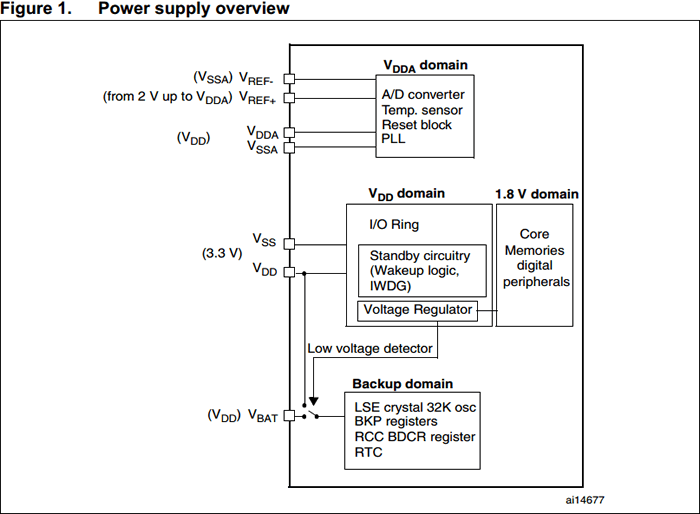
Вплив частоти тактування на енергоспоживання
Робоча частота мікроконтролера, та частота тактування периферії суттєво впливає на загальне споживання. Чим більша частота, тим вища потужність, яку споживає мікроконтролер.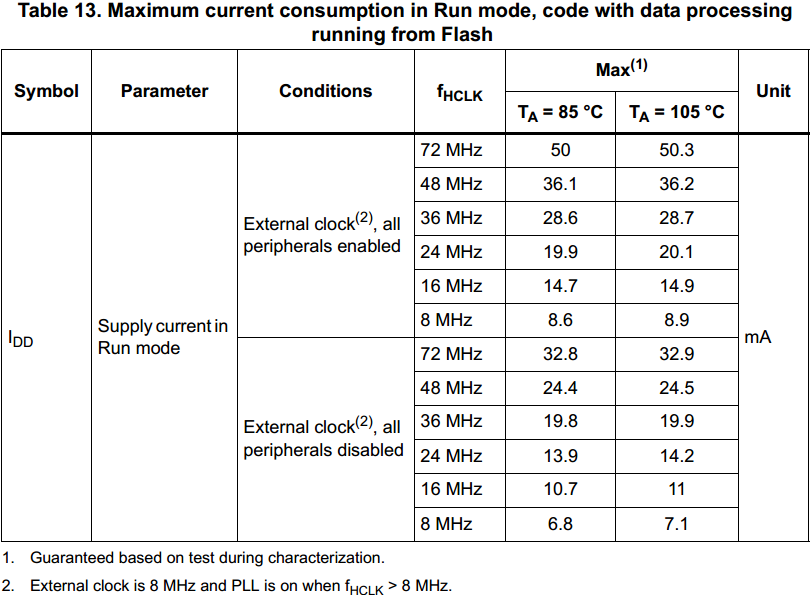
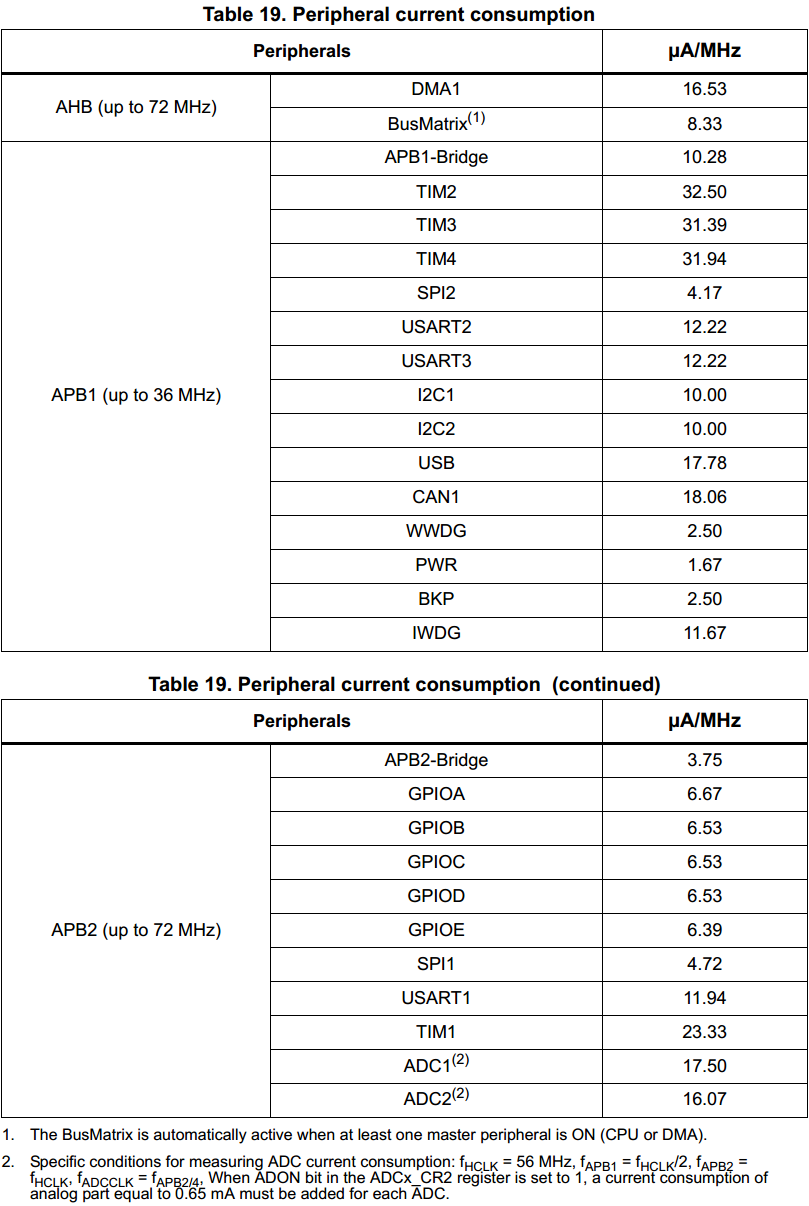 Тому, коли мова йде про енергозбереження, тактову частоту контролера треба вибирати мінімальну, яка задовольняє потребам. Те саме стосується периферії. Якщо поточні задачі дозволяють на деякий час вимикати тактування периферії, це теж може стати дієвим прийомом. Наприклад, Вам потрібно періодично вимірювати рівень заряду батареї. Достатньо увімкнути АЦП, виконати перетворення і вимкнути до наступного разу. Такий підхід теж може економити живлення.
Тому, коли мова йде про енергозбереження, тактову частоту контролера треба вибирати мінімальну, яка задовольняє потребам. Те саме стосується периферії. Якщо поточні задачі дозволяють на деякий час вимикати тактування периферії, це теж може стати дієвим прийомом. Наприклад, Вам потрібно періодично вимірювати рівень заряду батареї. Достатньо увімкнути АЦП, виконати перетворення і вимкнути до наступного разу. Такий підхід теж може економити живлення.
Режими зниженого енергоспоживання Sleep, Stop, Standby
Після вмикання мікроконтролер STM32 працює у режимі нормального енергоспоживання. Режими зниженого енергоспоживання призначені для зниження споживання енергії контролером, коли немає потреби в його функціонуванні. Наприклад, при очікуванні зовнішнього події. Мікроконтролер може працювати в наступних режимах зниженого енергоспоживання:- сплячий режим Sleep
- режим зупинки Stop
- режим очікування Standby
Режим Sleep
У сплячому режимі тактування ядра зупинено, периферія, в тому числі і ядро, працюють, виходи мікроконтролера зберігають свій стан. Перевести мікроконтролер у сплячий режим можна за допомогою однієї з двох команд:
__WFI();
__WFE();
NVIC_SystemLPConfig(NVIC_LP_SLEEPONEXIT, ENABLE);
NVIC_SystemLPConfig(NVIC_LP_SLEEPONEXIT, DISABLE);
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
#include "misc.h"
void SetSysClockToHSE(void)
{
ErrorStatus HSEStartUpStatus;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration -----------------------------*/
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig( RCC_HSE_ON);
/* Wait till HSE is ready */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if (HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1);
/* PCLK1 = HCLK */
RCC_PCLK1Config(RCC_HCLK_Div1);
/* Select HSE as system clock source */
RCC_SYSCLKConfig( RCC_SYSCLKSource_HSE);
/* Wait till PLL is used as system clock source */
while (RCC_GetSYSCLKSource() != 0x04)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock configuration.
User can add here some code to deal with this error */
/* Go to infinite loop */
while (1)
{
}
}
}
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
GPIOC->ODR ^= GPIO_Pin_13;
}
}
int main(void)
{
SetSysClockToHSE();
/* Initialize LED which connected to PC13 */
GPIO_InitTypeDef GPIO_InitStructure;
// Enable PORTC Clock
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC, GPIO_Pin_13); // Set C13 to Low level ("0")
// TIMER4
TIM_TimeBaseInitTypeDef TIMER_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM_TimeBaseStructInit(&TIMER_InitStructure);
TIMER_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIMER_InitStructure.TIM_Prescaler = 8000;
TIMER_InitStructure.TIM_Period = 500;
TIM_TimeBaseInit(TIM4, &TIMER_InitStructure);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM4, ENABLE);
/* NVIC Configuration */
/* Enable the TIM4_IRQn Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_SystemLPConfig(NVIC_LP_SLEEPONEXIT, ENABLE);
while(1)
{
/* Sleep */
__WFI();
}
}
Режим Stop
Режим зупинки - це режим глибокої сплячки ядра. В цьому режимі зупиняються всі генератори тактової частоти, а також відключаються PLL, HSI і HSE RC. У режимі зупинки всі виводи мікроконтролера зберігають свій стан. Для того, щоб ввести контролер у режим зупинки Stop, треба виконати функцію PWR_EnterSTOPMode. Приклад:
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI); // WFI
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFE); // WFE
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_pwr.h"
#include "stm32f10x_exti.h"
#include "misc.h"
void SetSysClockToHSE(void)
{
ErrorStatus HSEStartUpStatus;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration -----------------------------*/
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig( RCC_HSE_ON);
/* Wait till HSE is ready */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if (HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1);
/* PCLK1 = HCLK */
RCC_PCLK1Config(RCC_HCLK_Div1);
/* Select HSE as system clock source */
RCC_SYSCLKConfig( RCC_SYSCLKSource_HSE);
/* Wait till PLL is used as system clock source */
while (RCC_GetSYSCLKSource() != 0x04)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock configuration.
User can add here some code to deal with this error */
/* Go to infinite loop */
while (1)
{
}
}
}
int main(void)
{
int i;
SetSysClockToHSE();
/* Initialize LED which connected to PC13 */
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable PORTC Clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC, GPIO_Pin_13); // Set C13 to Low level ("0")
/* Enable clock for AFIO */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
/* Set pin as input */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
/* Tell system that you will use PB0 for EXTI_Line0 */
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
EXTI_InitTypeDef EXTI_InitStruct;
/* PD0 is connected to EXTI_Line0 */
EXTI_InitStruct.EXTI_Line = EXTI_Line0;
/* Enable interrupt */
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
/* Interrupt mode */
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Event;
/* Triggers on falling edge */
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;
/* Add to EXTI */
EXTI_Init(&EXTI_InitStruct);
while(1)
{
/* Stop */
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFE);
/* Toggle LED */
GPIOC->ODR ^= GPIO_Pin_13;
/* Delay */
for(i=0;i<0x100000;i++);
/* Configures system clock after wake-up */
SetSysClockToHSE();
}
}
Режим Standby
Режим Standby найекономічніший. Мікроконтролер у цьому стані вимикає майже все - PLL, HSI, HSE, регулятор живлення. Вся інформація у пам`яті та регістрах втрачається. Виводи переводяться у високоімпедансний стан, тобто відключаються. Стан контролера майже такий, як і без живлення. Майже, бо перед переходом у режим Standby можна сконфігурувати деякі речі, які будуть працювати і можуть вивести його з режиму Standby. А саме: Вхід у режим Standby виконується командою:
PWR_EnterSTANDBYMode();
- наростаючий фронт на вході WKUP
- наростаючий фронт будильника RTC
- зовнішній сигнал NRST (тобто RESET)
- перезавантаження від IWGT.
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_pwr.h"
int main(void)
{
int i, j;
/* Initialize Leds mounted on STM32 board */
GPIO_InitTypeDef GPIO_InitStructure;
/* Initialize LED which connected to PC13, Enable the Clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
// ENABLE Wake Up Pin
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);
PWR_WakeUpPinCmd(ENABLE);
while (1)
{
/* LED blink */
for(j=0; j<6; j++) {
/* Toggle LED which connected to PC13*/
GPIOC->ODR ^= GPIO_Pin_13;
/* delay */
for(i=0; i<0x100000; i++);
}
/* Disable LED */
GPIO_SetBits(GPIOC, GPIO_Pin_13);
/* Enters STANDBY mode */
PWR_EnterSTANDBYMode();
}
}
Вихід з режиму зниженого енергоспоживання за допомогою RTC
Для пробудження мікроконтролера з режимів з низьким споживанням можна використовувати годинник реального часу (RTC), який дозволяє програмувати інтервал часу для періодичного пробудження з режиму Stop або Standby. Щоб вивести мікроконтролер з економ-режиму за допомогою будильника RTC необхідно виконати наступні операції:- налаштувати лінію 17 EXTI на зростаючий фронт
- налаштувати RTC на генерацію сигнала тривоги (будильника)
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_pwr.h"
#include "stm32f10x_rtc.h"
unsigned char RTC_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
if ((RCC->BDCR & RCC_BDCR_RTCEN) != RCC_BDCR_RTCEN)
{
RCC_BackupResetCmd(ENABLE);
RCC_BackupResetCmd(DISABLE);
RCC_LSEConfig(RCC_LSE_ON);
while ((RCC->BDCR & RCC_BDCR_LSERDY) != RCC_BDCR_LSERDY) {}
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
/* Set prescaler */
RTC_SetPrescaler(0x7FFF);
/* Enable RTC */
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
return 1;
}
return 0;
}
int main(void)
{
int i, j;
/* Initialize Leds mounted on STM32 board */
GPIO_InitTypeDef GPIO_InitStructure;
/* Initialize LED which connected to PC13, Enable the Clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
RTC_Init();
/* Enable the RTC Alarm interrupt */
RTC_ITConfig(RTC_IT_ALR, ENABLE);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
while (1)
{
/* LED blink */
for(j=0; j<6; j++) {
/* Toggle LED which connected to PC13*/
GPIOC->ODR ^= GPIO_Pin_13;
/* delay */
for(i=0; i<0x100000; i++);
}
/* Alarm in 5 second */
RTC_SetAlarm(RTC_GetCounter()+ 5);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
/* Disable LED */
GPIO_SetBits(GPIOC, GPIO_Pin_13);
/* Enters STANDBY mode */
PWR_EnterSTANDBYMode();
}
}
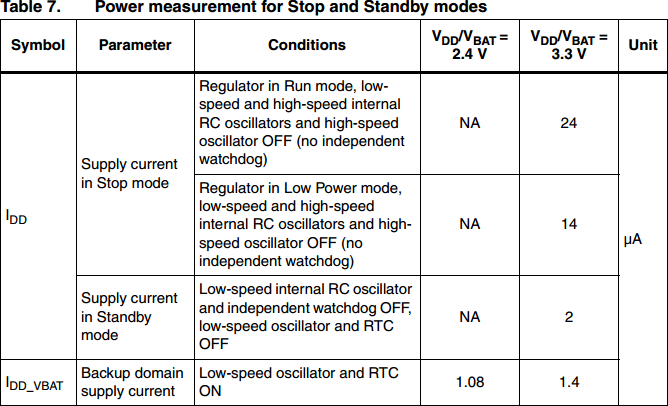
Рівень енергоспоживання у різних режимах
Чим глибший сон, тим менше контролер споживає енергії. У документації наведені наступні дані: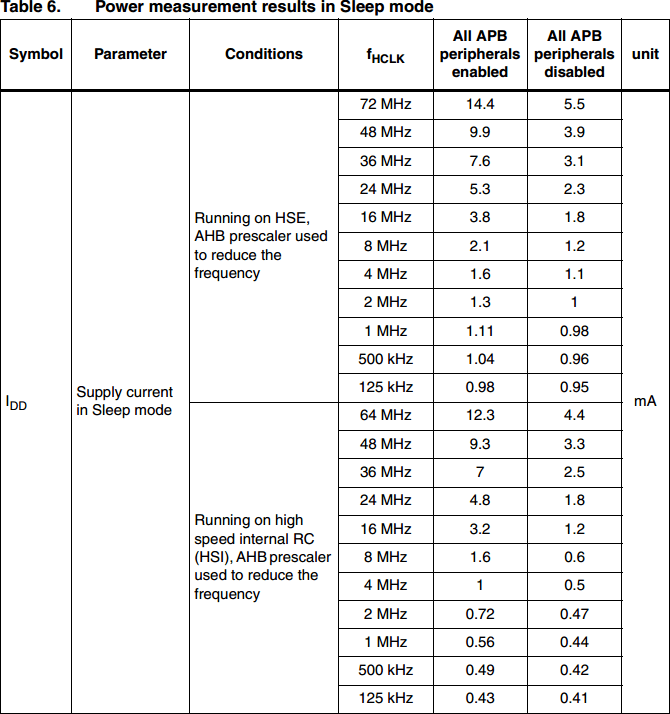
Час виходу з режиму зниженого енергоспоживання
Для виходу з режиму зниженого енергоспоживання мікроконтролеру потрібен певний час. Чим "глибший" сон, тим більше часу потрібно для повернення до роботи. У документації наведені наступні дані: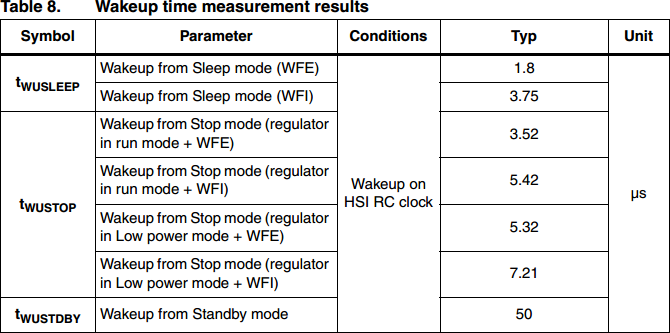
PVD (Programmable Voltage Detector)
Programmable Voltage Detector використовують коли є потреба моніторити напругу живлення щоб виконати якісь дії коли напруга живлення впаде нижче за зазначений рівень. Можна встановити рівень від 2.2В до 2.9В з шагом 0.1В:- PWR_PVDLevel_2V2
- PWR_PVDLevel_2V3
- PWR_PVDLevel_2V4
- PWR_PVDLevel_2V5
- PWR_PVDLevel_2V6
- PWR_PVDLevel_2V7
- PWR_PVDLevel_2V8
- PWR_PVDLevel_2V9
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_pwr.h"
#include "stm32f10x_exti.h"
#include "misc.h"
void PVD_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line16) != RESET)
{
/* Toggle LED which connected to PC13*/
if (PWR_GetFlagStatus(PWR_FLAG_PVDO) == RESET) {
GPIO_SetBits(GPIOC, GPIO_Pin_13);
}
else {
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
}
/* Clear the Key Button EXTI line pending bit */
EXTI_ClearITPendingBit(EXTI_Line16);
}
}
int main(void)
{
/* Initialize Leds mounted on STM32 board */
GPIO_InitTypeDef GPIO_InitStructure;
/* Initialize LED which connected to PC13, Enable the Clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure the GPIO_LED pin */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
/* Enable PWR and BKP clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
/* Configure the PVD Level to 2.9V */
PWR_PVDLevelConfig(PWR_PVDLevel_2V9);
/* Enable the PVD Output */
PWR_PVDCmd(ENABLE);
/* Configure EXTI Line16(PVD Output) to generate an interrupt on rising and falling edges */
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line16);
EXTI_InitStructure.EXTI_Line = EXTI_Line16;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
/* Enable the PVD Interrupt */
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = PVD_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
while (1)
{
}
}
Дивись також:
- 1. STM32. Програмування STM32F103. Тестова плата. Прошивка через UART та через ST-Link
- 2. STM32. Програмування. IDE для STM32
- 3. STM32. Програмування STM32F103. GPIO
- 4. STM32. Програмування STM32F103. Тактування
- 5. STM32. Програмування STM32F103. USART
- 6. STM32. Програмування STM32F103. NVIC
- 7. STM32. Програмування STM32F103. ADC
- 8. STM32. Програмування STM32F103. DMA
- 9. STM32. Програмування STM32F103. TIMER
- 10. STM32. Програмування STM32F103. TIMER. Захоплення сигналу
- 11. STM32. Програмування STM32F103. TIMER. Encoder
- 12. STM32. Програмування STM32F103. TIMER. PWM
- 13. STM32. Програмування STM32F103. EXTI
- 14. STM32. Програмування STM32F103. RTC
- 15. STM32. Програмування STM32F103. BKP
- 16. STM32. Програмування STM32F103. Flash
- 17. STM32. Програмування STM32F103. Watchdog
- 18. STM32. Програмування STM32F103. Remap
- 19. STM32. Програмування STM32F103. I2C Master
- 20. STM32. Програмування STM32F103. I2C Slave
- 21. STM32. Програмування STM32F103. USB
- 22. STM32. Програмування STM32F103. PWR
- 23. STM32. Програмування STM32F103. Option bytes
- 24. STM32. Програмування STM32F103. Bootloader
- STM32. Скачати приклади
- System Workbench for STM32 Інсталяція на Ubuntu
- Keil uVision5 – IDE для STM32
- IAR Workbench – IDE для STM32
- Керування безколекторним двигуном постійного струму (BLDC) за допомогою STM32
- Керування PMSM за допомогою STM32
Tags
timer meteo pwm capture dma smd brushless sensors 3d-printer examples sms git st-link adc rfid exti web bme280 bmp280 gps options barometer battery lcd dht11 hih-4000 atmega dc-dc piezo solar bluetooth displays mpx4115a bldc websocket eb-500 motor raspberry-pi usb rtc usart max1674 avr soldering mongodb esp8266 programmator mpu-6050 remap rs-232 pmsm bkp gpio i2c eeprom encoder stm32 css docker flask nodemcu ssd1331 tim flash servo nvic ssd1306 mpu-9250 ethernet led foc python ngnix watchdog books html java-script wifi uart
Архіви